OpenCV
OpenCV(Open Source Computer Vision Library,开源计算机视觉库)诞生于 1999 年 Intel Research,如今由 OpenCV.org 基金会维护,是目前全球使用最广泛的开源计算机视觉与机器学习软件库之一。
| 维度 | 说明 |
|---|---|
| 语言绑定 | C++(原生)、Python(最流行)、Java、JavaScript、MATLAB、Go、Rust 等 |
| 平台覆盖 | Linux、Windows、macOS、Android、iOS、RTOS、WebAssembly |
| 硬件加速 | CPU(SSE/AVX/NEON)、CUDA、OpenCL、Vulkan、Metal、NPU(VPI、RKNPU、TIM-VX…) |
| 算法规模 | 2500+ 优化算法,涵盖传统 CV 与深度学习 |
| 生态工具 | 训练框架(Model Zoo)、标注工具(CVAT)、优化工具(OpenVINO、TensorRT 插件) |
1.Python库
1.1 PIP安装
pip3 install --break-system-packages opencv-python
如果是国内用户可指定国内源安装,执行:
pip3 install --break-system-packages opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple
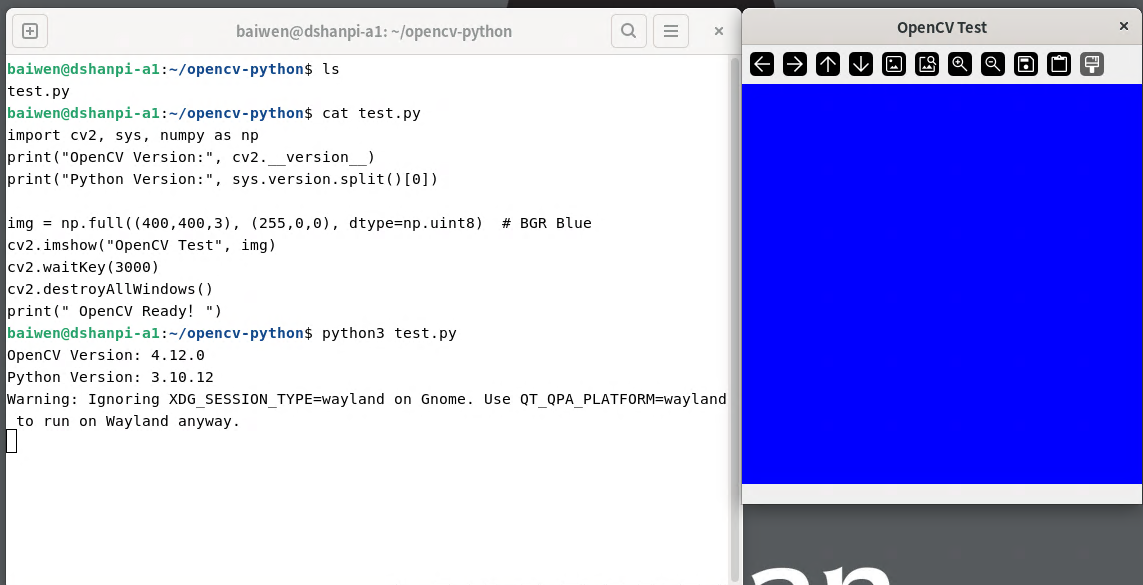
1.2 测试
新建文件test.py,将下面的内容填入:
import cv2, sys, numpy as np
print("OpenCV Version:", cv2.__version__)
print("Python Version:", sys.version.split()[0])
img = np.full((400,400,3), (255,0,0), dtype=np.uint8) # BGR Blue
cv2.imshow("OpenCV Test", img)
cv2.waitKey(3000)
cv2.destroyAllWindows()
print("OpenCV Ready!")
填写完代码后执行:
python3 test.py
运行效果如下:
2.C++库
2.1 APT安装
sudo apt install libopencv-dev -y
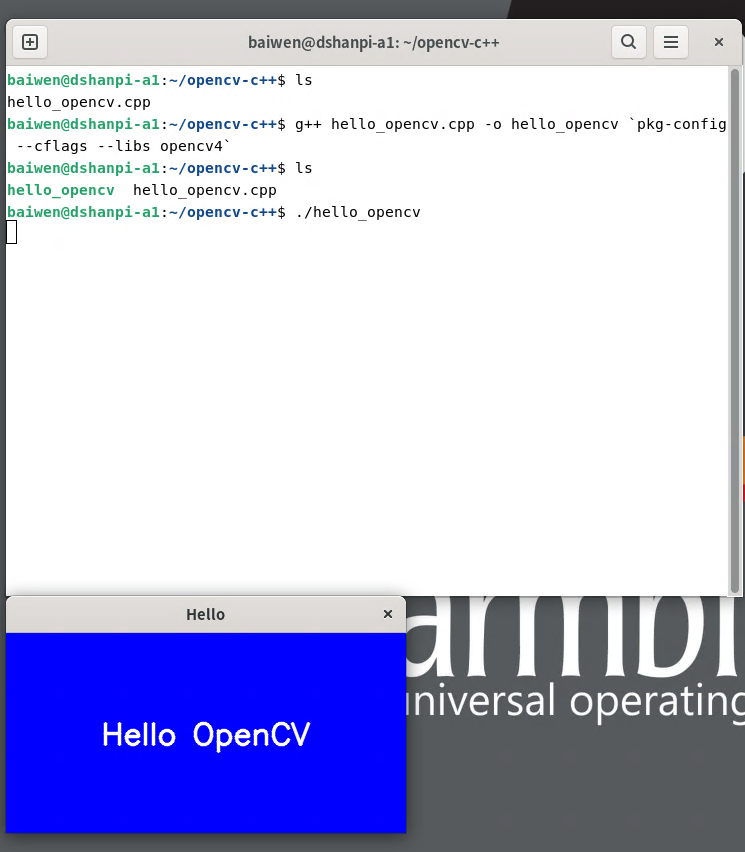
2.2 测试
#include <opencv2/opencv.hpp>
int main()
{
// 画布尺寸
int width = 400, height = 200;
// 创建蓝色背景 (BGR)
cv::Mat img(height, width, CV_8UC3, cv::Scalar(255, 0, 0));
// 配置文字
std::string text = "Hello OpenCV";
int fontFace = cv::FONT_HERSHEY_SIMPLEX;
double fontScale = 1.0;
int thickness = 2;
// 计算文字大小,使文字居中
int baseline = 0;
cv::Size textSize = cv::getTextSize(text, fontFace, fontScale, thickness, &baseline);
cv::Point org((width - textSize.width) / 2,
(height + textSize.height) / 2);
// 绘制文字(白色)
cv::putText(img, text, org, fontFace, fontScale,
cv::Scalar(255, 255, 255), thickness, cv::LINE_AA);
// 保存到磁盘
cv::imwrite("hello_opencv.jpg", img);
cv::imshow("Hello", img);
cv::waitKey(3000);
return 0;
}
编译 & 运行:
# 编译
g++ hello_opencv.cpp -o hello_opencv `pkg-config --cflags --libs opencv4`
# 运行
./hello_opencv
3.本地编译
1.下载OpenCV包(以4.12为例)
wget https://github.com/opencv/opencv/archive/refs/tags/4.12.0.zip
如果无法下载可访问OpenCV官网资源下载:https://opencv.org/releases/
2.解压OpenCV库
unzip 4.12.0.zip
解压完成后进入OpenCV库目录。
3.安装编译依赖
sudo apt update
sudo apt install -y build-essential cmake git pkg-config \
libgtk-3-dev libavcodec-dev libavformat-dev libswscale-dev \
libtbb-dev libjpeg-dev libpng-dev libtiff-dev libdc1394-dev \
libv4l-dev libxvidcore-dev libx264-dev libopenexr-dev \
libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev \
python3-dev python3-numpy
4.编译
- 在OpenCV库目录下新建编译文件夹:
mkdir build
cd build
- 生成cmake编译规则
cmake ..
- 编译
make -j$(nproc)
- 安装
sudo make install
sudo ldconfig
4.更多示例代码
注意:下面的Python代码均会使用USB摄像头,请提前将USB摄像头接入到板子的USB口中!!!
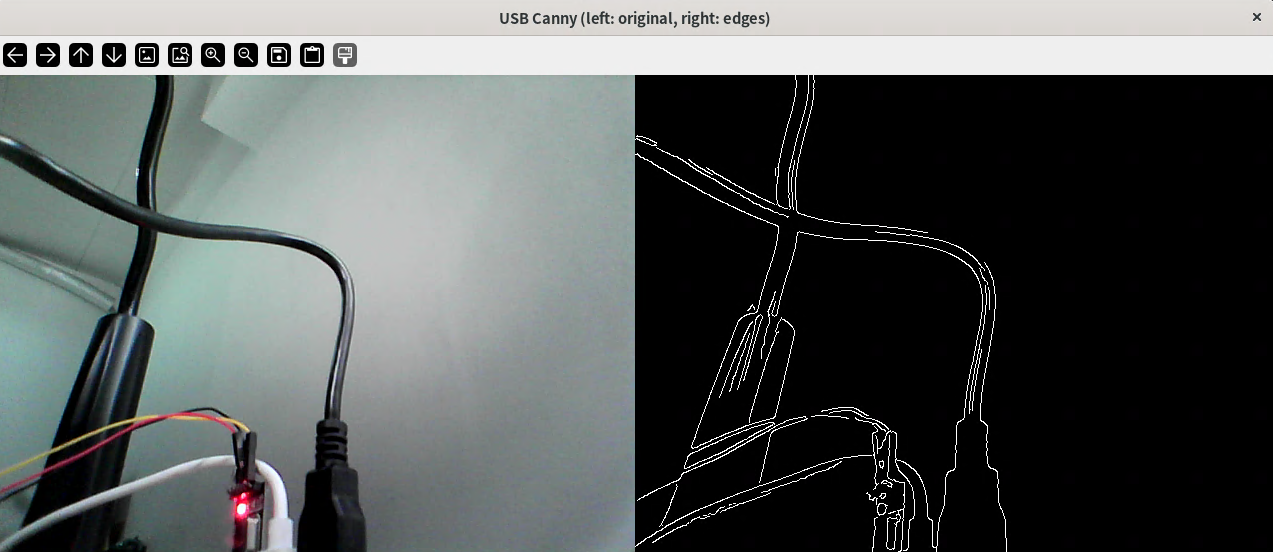
4.1 Canny 边缘检测
#!/usr/bin/env python3
import cv2
# Open the default USB camera (index 0)
cap = cv2.VideoCapture(0, cv2.CAP_V4L2) # CAP_V4L2 is faster on Linux
if not cap.isOpened():
raise RuntimeError("Cannot open camera; check connection or permissions")
# Optional: set resolution
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
# Canny thresholds
low_th = 100
high_th = 200
while True:
ret, frame = cap.read()
if not ret:
print("Failed to grab frame")
break
# 1. Convert to grayscale and apply Gaussian blur
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
# 2. Canny edge detection
edges = cv2.Canny(blur, low_th, high_th)
# 3. Convert single-channel edge map back to 3-channel for display
edges_bgr = cv2.cvtColor(edges, cv2.COLOR_GRAY2BGR)
# 4. Concatenate original and edge images side by side
combined = cv2.hconcat([frame, edges_bgr])
cv2.imshow("USB Canny (left: original, right: edges)", combined)
# 5. Exit on 'q' or ESC
key = cv2.waitKey(1) & 0xFF
if key in (27, ord('q')):
break
# Release resources
cap.release()
cv2.destroyAllWindows()
运行效果:
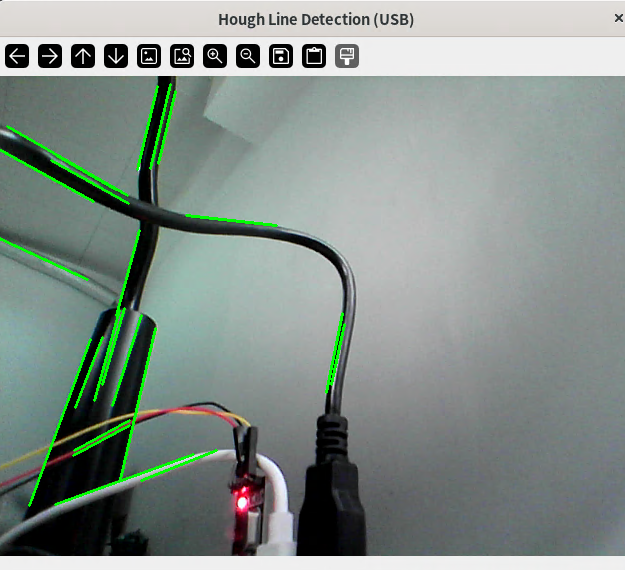
4.2 线段检测
#!/usr/bin/env python3
import cv2
import numpy as np
# open default USB camera
cap = cv2.VideoCapture(0, cv2.CAP_V4L2)
if not cap.isOpened():
raise RuntimeError("Cannot open camera")
# optional resolution
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
# Hough parameters
rho_res = 1 # pixel resolution
theta_res = np.pi/180 # radian resolution
thresh = 80 # accumulator threshold
min_len = 50 # minimum line length
max_gap = 10 # maximum gap between segments
while True:
ret, frame = cap.read()
if not ret:
print("Failed to grab frame")
break
# 1. grayscale + blur
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
# 2. Canny edge map
edges = cv2.Canny(blur, 50, 150)
# 3. Probabilistic Hough Transform
lines = cv2.HoughLinesP(edges,
rho_res,
theta_res,
threshold=thresh,
minLineLength=min_len,
maxLineGap=max_gap)
# 4. draw lines on copy of original frame
display = frame.copy()
if lines is not None:
for x1, y1, x2, y2 in lines[:, 0]:
cv2.line(display, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 5. show result
cv2.imshow("Hough Line Detection (USB)", display)
# 6. exit on 'q' or ESC
key = cv2.waitKey(1) & 0xFF
if key in (27, ord('q')):
break
# cleanup
cap.release()
cv2.destroyAllWindows()
运行效果:
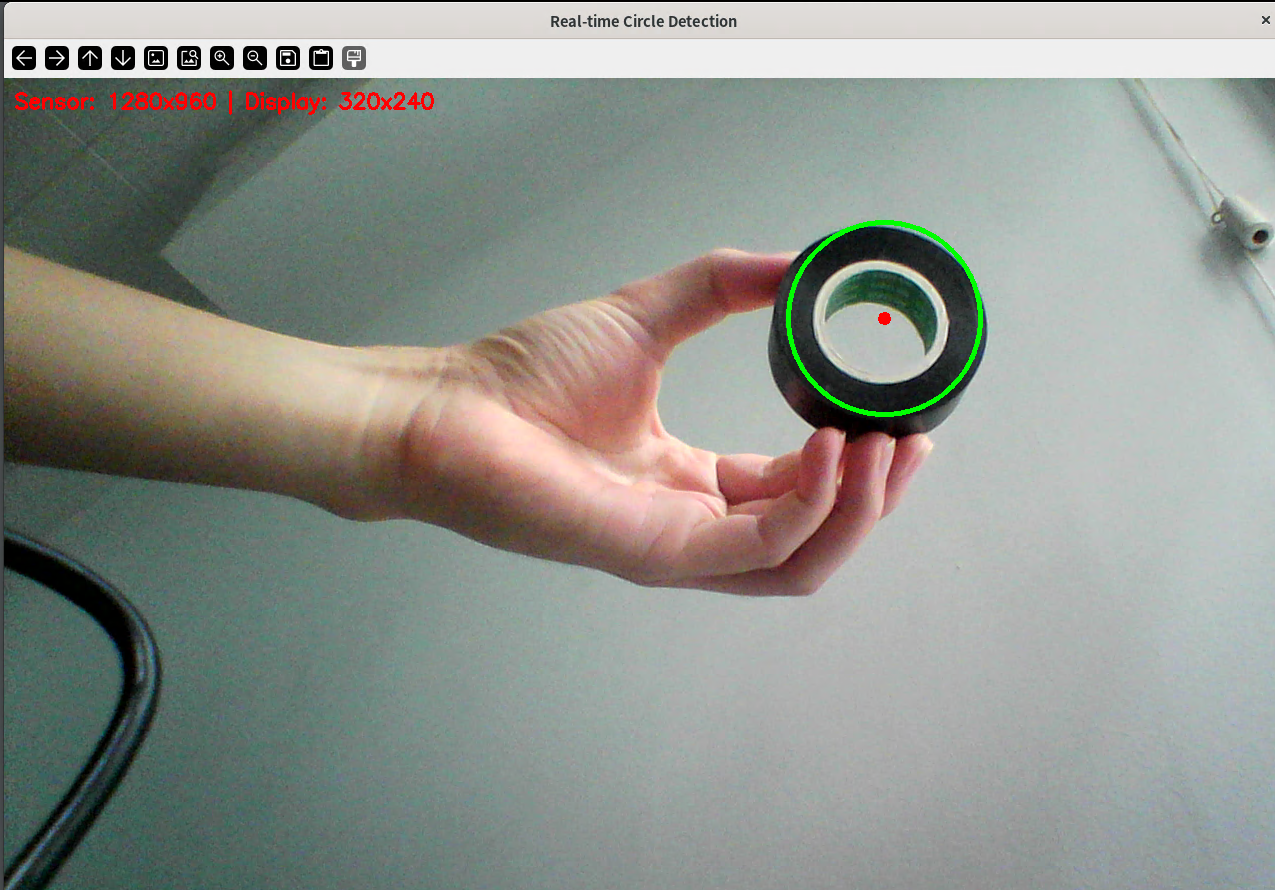
4.3 圆检测
#!/usr/bin/env python3
import cv2
import numpy as np
# camera configuration
SENSOR_W, SENSOR_H = 1280,960 # native sensor resolution
FRAME_W, FRAME_H = 320, 240 # processing / display resolution
# open camera 0 and set native resolution
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, SENSOR_W)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, SENSOR_H)
if not cap.isOpened():
print(f"Failed to open camera 1 at {SENSOR_W}x{SENSOR_H}! Check connection.")
exit()
print(f"Camera configured: capture {SENSOR_W}x{SENSOR_H} → process {FRAME_W}x{FRAME_H}")
# scale factor for parameter adaptation
SCALE_FACTOR = max(SENSOR_W / FRAME_W, SENSOR_H / FRAME_H)
while True:
# grab full-resolution frame
ret, frame_high_res = cap.read()
if not ret:
print("Frame capture failed, exiting...")
break
# down-scale for processing
frame = cv2.resize(frame_high_res, (FRAME_W, FRAME_H))
# grayscale + blur
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (9, 9), 2)
# adapt detection parameters according to scale
min_dist_scaled = max(20, int(50 / SCALE_FACTOR))
min_radius_scaled = max(5, int(10 / SCALE_FACTOR))
max_radius_scaled = min(100,int(100 / SCALE_FACTOR))
# detect circles via Hough transform
circles = cv2.HoughCircles(
blur,
cv2.HOUGH_GRADIENT,
dp=1,
minDist=min_dist_scaled,
param1=50,
param2=30,
minRadius=min_radius_scaled,
maxRadius=max_radius_scaled
)
# draw detected circles on the high-resolution frame
if circles is not None:
circles = np.uint16(np.around(circles))
for x, y, r in circles[0, :]:
# map coordinates back to high-resolution space
x_hr = int(x * SCALE_FACTOR)
y_hr = int(y * SCALE_FACTOR)
r_hr = int(r * SCALE_FACTOR)
# draw circle and center
cv2.circle(frame_high_res, (x_hr, y_hr), r_hr, (0, 255, 0), 3)
cv2.circle(frame_high_res, (x_hr, y_hr), 3, (0, 0, 255), 5)
# overlay resolution info
cv2.putText(frame_high_res,
f"Sensor: {SENSOR_W}x{SENSOR_H} | Display: {FRAME_W}x{FRAME_H}",
(10, 30),
cv2.FONT_HERSHEY_SIMPLEX,
0.7,
(0, 0, 255),
2)
# display result
cv2.imshow("Real-time Circle Detection", frame_high_res)
# quit on 'q'
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# cleanup
cap.release()
cv2.destroyAllWindows()
运行效果:
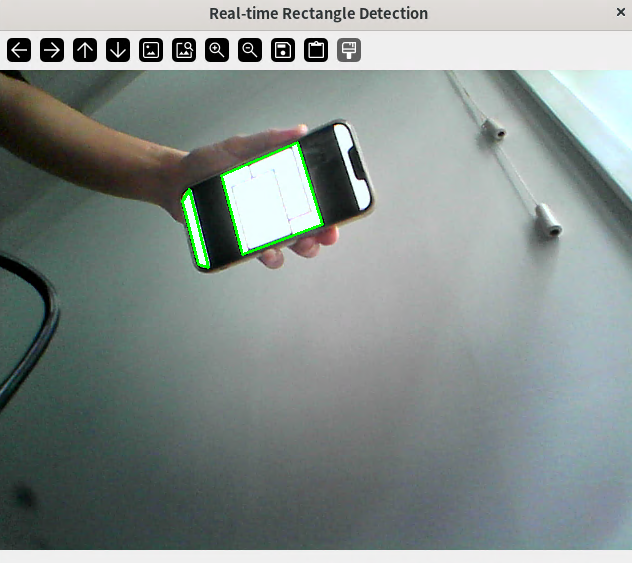
4.4 矩形检测
#!/usr/bin/env python3
import cv2
import numpy as np
# ------------ camera setup ------------
cap = cv2.VideoCapture(0, cv2.CAP_V4L2) # change index if necessary
if not cap.isOpened():
raise RuntimeError("Cannot open camera")
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
# ------------ parameters ------------
# Canny thresholds
CANNY_LOW = 50
CANNY_HIGH = 150
# contour approximation accuracy (epsilon = arcLength * ratio)
APPROX_RATIO = 0.02
# min area filter (ignore tiny noise)
MIN_AREA = 500
while True:
ret, frame = cap.read()
if not ret:
print("Frame read failed")
break
# ---------- pre-processing ----------
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
edges = cv2.Canny(blur, CANNY_LOW, CANNY_HIGH)
# ---------- find contours ----------
contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
# ---------- loop over contours ----------
for cnt in contours:
area = cv2.contourArea(cnt)
if area < MIN_AREA:
continue
# polygonal approximation
epsilon = APPROX_RATIO * cv2.arcLength(cnt, True)
approx = cv2.approxPolyDP(cnt, epsilon, True)
# we need 4 vertices => rectangle
if len(approx) == 4:
cv2.drawContours(frame, [approx], -1, (0, 255, 0), 2)
# ---------- display ----------
cv2.imshow("Real-time Rectangle Detection", frame)
# quit on 'q' or ESC
key = cv2.waitKey(1) & 0xFF
if key in (27, ord('q')):
break
# ---------- cleanup ----------
cap.release()
cv2.destroyAllWindows()
运行效果:
4.5 快速线性回归
#!/usr/bin/env python3
import cv2
import numpy as np
# ---------- camera ----------
cap = cv2.VideoCapture(0, cv2.CAP_V4L2)
if not cap.isOpened():
raise RuntimeError("Cannot open camera")
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
# ---------- parameters ----------
CANNY_LOW = 50
CANNY_HIGH = 150
HOUGH_RHO = 1
HOUGH_THETA = np.pi / 180
HOUGH_TH = 100 # Hough threshold
MIN_LINE = 50 # minLineLength
MAX_GAP = 10 # maxLineGap
DRAW_COLOR = (0, 255, 0)
DRAW_THICK = 3
def draw_regression(frame, points):
"""Fit y = kx + b with NumPy polyfit and draw the line."""
if points.shape[0] < 2:
return
x, y = points[:, 0], points[:, 1]
k, b = np.polyfit(x, y, 1) # 1-degree polynomial = linear
h, w = frame.shape[:2]
x0, x1 = 0, w
y0, y1 = int(k * x0 + b), int(k * x1 + b)
cv2.line(frame, (x0, y0), (x1, y1), DRAW_COLOR, DRAW_THICK)
while True:
ret, frame = cap.read()
if not ret:
print("Frame read failed")
break
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
edges = cv2.Canny(blur, CANNY_LOW, CANNY_HIGH)
# Hough line segments
lines = cv2.HoughLinesP(edges,
HOUGH_RHO,
HOUGH_THETA,
HOUGH_TH,
minLineLength=MIN_LINE,
maxLineGap=MAX_GAP)
# collect endpoints
pts = []
if lines is not None:
for x1, y1, x2, y2 in lines[:, 0]:
pts.extend([[x1, y1], [x2, y2]])
if pts:
pts = np.array(pts, dtype=np.float32)
draw_regression(frame, pts)
cv2.imshow("USB Line Regression", frame)
if cv2.waitKey(1) & 0xFF in (27, ord('q')):
break
cap.release()
cv2.destroyAllWindows()
运行效果:

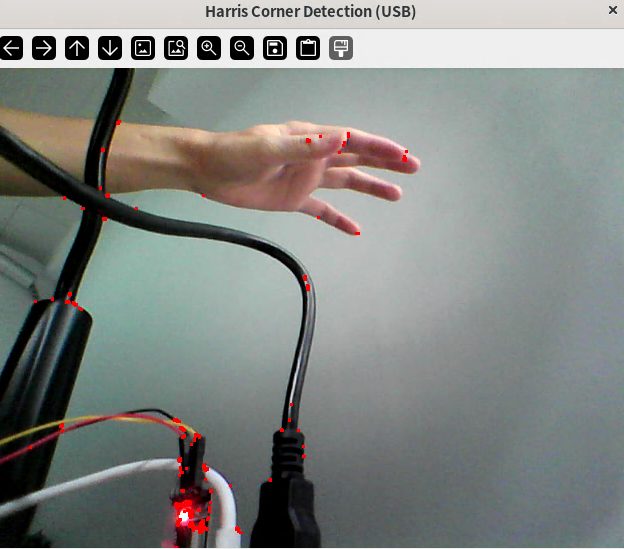
4.6 角点检测
#!/usr/bin/env python3
import cv2
import numpy as np
# ---------- open camera ----------
cap = cv2.VideoCapture(0, cv2.CAP_V4L2) # change index if needed
if not cap.isOpened():
raise RuntimeError("Cannot open camera")
# optional resolution
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
# ---------- Harris parameters ----------
HARRIS_BLOCK_SIZE = 2 # neighbourhood size
HARRIS_KSIZE = 3 # Sobel aperture
HARRIS_K = 0.04 # Harris detector free parameter
THRESH_RATIO = 0.01 # corner response threshold ratio
while True:
ret, frame = cap.read()
if not ret:
print("Frame read failed")
break
# ---------- Harris corner detection ----------
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv2.cornerHarris(gray,
blockSize=HARRIS_BLOCK_SIZE,
ksize=HARRIS_KSIZE,
k=HARRIS_K)
# dilate corners for better visibility
dst = cv2.dilate(dst, None)
# threshold corner response
frame[dst > THRESH_RATIO * dst.max()] = [0, 0, 255]
# ---------- show ----------
cv2.imshow("Harris Corner Detection (USB)", frame)
# quit on 'q' or ESC
key = cv2.waitKey(1) & 0xFF
if key in (27, ord('q')):
break
# ---------- cleanup ----------
cap.release()
cv2.destroyAllWindows()
运行效果:
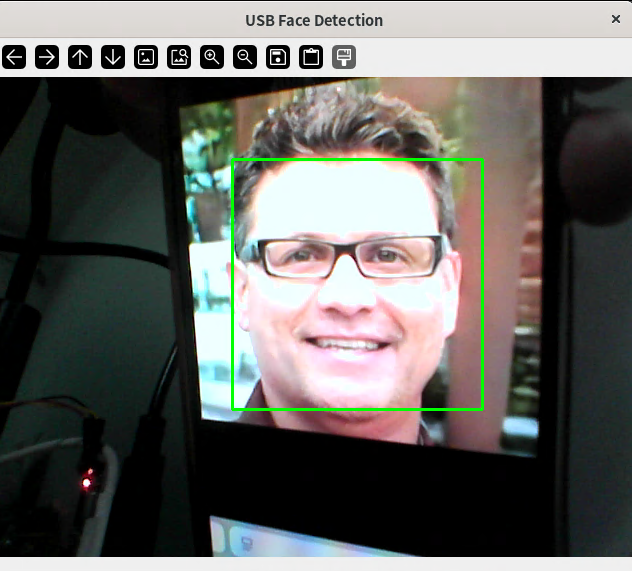
4.7 人脸检测
#!/usr/bin/env python3
import cv2
# 0. 打开摄像头
cap = cv2.VideoCapture(0, cv2.CAP_V4L2)
if not cap.isOpened():
raise RuntimeError("Cannot open camera")
# 1. 加载 Haar 人脸模型(已随 OpenCV 安装)
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades +
'haarcascade_frontalface_default.xml')
while True:
ret, frame = cap.read()
if not ret:
break
# 2. 灰度化 + 检测
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray,
scaleFactor=1.1,
minNeighbors=5,
minSize=(50, 50))
# 3. 画框
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x + w, y + h),
(0, 255, 0), 2)
# 4. 显示
cv2.imshow("USB Face Detection", frame)
if cv2.waitKey(1) & 0xFF in (27, ord('q')):
break
cap.release()
cv2.destroyAllWindows()
运行效果: