DshanPI-A1第三篇opencv调试与cpu直接推理识别手势
前面我们已经调试好了摄像头和屏幕,终于可以开始我们的手势识别啦!
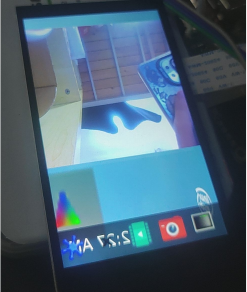
这次我会在RK3576 Buildroot系统上实现一个基于OpenCV的实时手势识别系统。系统能够识别五种手势(拳头/一指、二指、三指、四指、五指),并在屏幕上实时显示处理结果。
由于嵌入式系统的特殊性,我们将重点讲解如何在无X11、无OpenGL的Wayland环境下实现图像显示。
手势识别算法
原理
因为我们张开的手指之间会形成凹陷,通过计算凹陷点的角度和深度,可以准确识别手指数量。
1. 肤色检测
使用HSV色彩空间提取肤色区域:
def detect_hand(self, frame):
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(hsv, [0, 30, 60], [25, 255, 255]) # 肤色范围
# 形态学处理去噪
kernel = np.ones((7, 7), np.uint8)
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, kernel, iterations=3)
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel, iterations=2)
# 查找最大轮廓
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if contours:
c = max(contours, key=cv2.contourArea)
if cv2.contourArea(c) > 3000: # 面积阈值过滤噪声
return c, mask
return None, mask
2. 手指计数(凸包缺陷法)
通过检测手掌轮廓的凹陷点来识别手指:
def recognize(self, contour):
hull = cv2.convexHull(contour, returnPoints=False)
defects = cv2.convexityDefects(contour, hull)
finger_count = 0
for i in range(defects.shape[0]):
s, e, f, d = defects[i, 0]
start = tuple(contour[s][0]) # 凸点1
end = tuple(contour[e][0]) # 凸点2
far = tuple(contour[f][0]) # 凹点(指间)
# 计算角度判断是否为有效指尖
a = np.linalg.norm(np.array(start) - np.array(end))
b = np.linalg.norm(np.array(start) - np.array(far))
c = np.linalg.norm(np.array(end) - np.array(far))
angle = np.arccos((b**2 + c**2 - a**2) / (2 * b * c))
if angle <= np.pi / 2.2 and d > 8000: # 角度和深度阈值
finger_count += 1
gestures = ["Fist/One", "Two", "Three", "Four", "Five"]
return gestures[finger_count]
如何显示OpenCV处理的图像
有了前面的理论知识还是不够的,我们还需要实践才可以啊!如何显示OpenCV处理的图像这是本教程的重点。通常我们用cv2.imshow()显示图像,但在无X11/OpenGL的嵌入式系统上,这个方法不可用。我们需要使用GStreamer+Wayland方案(这个也是我们上一篇文章的方案)。
方案探索过程
方案A: stdin管道传输
最直观的想法是通过stdin管道传输图像数据:
proc = subprocess.Popen(['gst-launch-1.0', 'fdsrc', '!', ...], stdin=subprocess.PIPE)
proc.stdin.write(frame_data)
结果:频繁出现Broken pipe错误,数据传输不稳定,这个我怀疑是管道超时自动关闭了又或者是我的格式不对。所以我直接尝试用fifo来传输原始的数据
方案B: 命名管道(FIFO)传输原始数据
尝试用FIFO传输原始RGB数据:
mkfifo /tmp/video_fifo
很遗憾啊,这个太容易动不动就内核奔溃了。到这个时候我面临几个问题:如果我单纯的用命令行看识别结果,我就不知道我的摄像头能不能正常运行;但是如果OpenCV和GStreamer同时读取摄像头是不可以的(摄像头只能被一个进程读取)。后面又觉得GStreamer的显示不需要实时读取摄像头的画面,我只要显示OpenCV处理过的就好了。说干就干,于是我尝试直接在OpenCV里面把处理后的图像通过GStreamer传到屏幕上面,但技术不达标无果,管道不是报错就是关闭。停下来慢慢思考,最后有了方案C(搞到这步已经花费三天了)。
方案C: 多文件序列
改变思路,将处理后的图像保存为JPEG文件序列:
# Python端
cv2.imwrite(f'/dev/shm/gesture_frames/frame_{frame_index:03d}.jpg', processed)
# GStreamer端
gst-launch-1.0 multifilesrc location=frame_%03d.jpg loop=true ! jpegdec ! ...
结果:屏幕终于可以有变动了,开心坏了!但是效果很差,重影严重,而且因为是循环读出文件夹的图片导致一直在循环播放,影响美观和体验度。于是我打算利用FIFO,基于前面的思路升级为现在的方案:
OpenCV处理完一帧 → 立即编码JPEG → 直接写入FIFO → GStreamer立即解码显示
方案D: FIFO+JPEG流(最终方案!)
# Python端: 直接往FIFO写JPEG数据
fifo = open('/tmp/gesture_fifo', 'wb')
_, jpeg = cv2.imencode('.jpg', processed, [cv2.IMWRITE_JPEG_QUALITY, 85])
fifo.write(jpeg.tobytes())
fifo.flush()
# GStreamer端: 用jpegparse自动分割JPEG帧
gst-launch-1.0 filesrc location=/tmp/gesture_fifo ! jpegparse ! jpegdec ! ...
补充:为什么JPEG流可行?
- JPEG格式自带开始(0xFFD8)和结束(0xFFD9)标记
- GStreamer的
jpegparse插件能自动识别边界,分割独立的JPEG帧 - 避免了原始数据流的粘包问题
结果:总算是可以流畅地观察到画面了(流程不卡顿,甚至比直接点屏幕上的摄像头图标看摄像头画面都流畅)。演示视频和代码我会放在附件里面。

番外篇—摄像头第二次启动色彩偏绿偏暗
问题描述
我在RK3576 Buildroot系统上使用IMX415摄像头,通过GStreamer+Wayland显示画面。遇到了一个诡异的问题:第一次启动摄像头色彩正常,但第二次启动后画面就变得偏暗偏绿。

初步分析:对比启动日志
我首先对比了两次启动的kernel日志,发现了关键差异:
第一次启动(色彩正常):
[20.528641] rkisp_hw 27c00000.isp: set isp clk = 594000000Hz
[20.529097] rkcif-mipi-lvds 3: stream[0] start streaming
[20.529317] rockchip-csi2-dphy 3: dphy3, data_rate_mbps 892
[20.529356] imx415 3-0037: s_stream: 1.3864x2192, hdr: 0, bpp: 10
第二次启动(色彩异常):
[79.209321] rkisp_hw 27c00000.isp: set isp clk = 594000000Hz
[79.209967] rkisp rkisp-vir3: first params buf queue
[79.210051] rkisp rkisp-vir3: id: 0 no first iq setting cfg_upd: c000dfecc7fe473b en_upd: 0 en s: 5ffcc7fe473b
[79.210351] rkcif-mipi-lvds 3: stream[0] start streaming
关键发现:第二次启动多了一条警告 no first iq setting。这说明ISP的图像质量参数没有正确加载,导致使用了错误的默认参数,造成色彩偏暗偏绿。
问题解决过程
第一阶段:尝试硬件层面解决
一开始我以为是ISP驱动状态没有正确复位,尝试了几种方法:
-
尝试unbind/bind ISP驱动:
echo "27c00000.isp" > /sys/bus/platform/drivers/rkisp_hw/unbind
echo "27c00000.isp" > /sys/bus/platform/drivers/rkisp_hw/bind结果:摄像头直接打不开了,操作太激进导致驱动状态完全错乱。
-
尝试使用v4l2-ctl重置、media-ctl reset等方法,都没有解决问题。
第二阶段:深入诊断系统配置
我开始系统性地诊断整个摄像头子系统:
# 查找IQ参数文件
find / -name "*imx415*.xml" -o -name "*imx415*.json" 2>/dev/null
# 结果: 找到了 /etc/iqfiles/imx415_CMK-OT2022-PX1_IR0147-50IRC-8M-F20.json
# 检查3A服务器
ps aux | grep rkaiq_3A_server
# 结果: 服务器正在运行
# 查看设备拓扑
v4l2-ctl --list-devices
# 确认 /dev/video-camera0 -> video11
关键发现:
- IQ参数文件存在
- 3A服务器(rkaiq_3A_server)正在运行
- 但为什么IQ参数没有加载?
第三阶段:抓取3A服务器日志
我决定前台运行3A服务器,查看详细输出:
killall rkaiq_3A_server
/usr/bin/rkaiq_3A_server 2>&1 &
启动日志显示:
DBG: get rkisp-isp-subdev devname: /dev/v4l-subdev3
DBG: get rkisp-input-params devname: /dev/video18
DBG: get rkisp-statistics devname: /dev/video17
XCORE: K: cid[1] rk_aiq_uapi2_sysctl_init success. iq: /etc/iqfiles//imx415_CMK-OT2022-PX1_IR0147-50IRC-8M-F20.json
XCORE: K: cid[1] rk_aiq_uapi2_sysctl_prepare success. mode: 0
DBG: /dev/media1: wait stream start event..
重大发现:3A服务器实际上工作正常!IQ文件已经成功加载了!
这时我进行了第二次摄像头启动测试,观察到:
[625.216117] rkisp-vir3: waiting on params stream one event timeout
真相大白:第二次启动时,3A服务器超时无响应!
第四阶段:找到根本原因
通过多次测试和日志分析,我终于理解了问题的本质:
第一次启动流程(正常):
- 系统启动时,3A服务器自动启动
- 3A服务器加载IQ参数文件到内存
- 3A服务器预先准备好IQ参数缓冲区
- GStreamer启动摄像头
- ISP请求IQ参数
- 3A服务器立即响应并推送IQ参数
- 色彩正常
第二次启动流程(异常):
- 停止第一次的GStreamer进程
- 3A服务器还在运行,但进入了某种等待状态
- IQ参数缓冲区已经被消费
- 立即重启GStreamer
- ISP请求IQ参数
- 3A服务器来不及响应或状态异常
- ISP使用默认参数处理第一帧
- 出现
no first iq setting警告 - 色彩偏暗偏绿
解决方案
问题的根源是:3A服务器在摄像头第一次运行后进入异常状态,无法正确响应第二次启动的IQ参数请求。
最终的解决方法很简单:每次启动摄像头前,重启3A服务器。
我编写了一个封装脚本:
#!/bin/sh
echo "=== Starting Camera with 3A Server Reset ==="
# 1. 停止所有摄像头进程
pkill -9 gst-launch 2>/dev/null
# 2. 重启3A服务器
killall rkaiq_3A_server 2>/dev/null
sleep 2
rm -f /tmp/.rkaiq_3A*
# 3. 启动3A服务器
/etc/init.d/S40rkaiq_3A start
echo "Waiting for 3A server to initialize..."
sleep 5
# 4. 确认3A服务器运行正常
if ! pgrep rkaiq_3A_server > /dev/null; then
echo "ERROR: 3A server failed to start!"
exit 1
fi
echo "3A server ready, starting camera..."
# 5. 启动摄像头
gst-launch-1.0 v4l2src device=/dev/video11 ! \
video/x-raw,format=NV12,width=640,height=480,framerate=30/1 ! \
waylandsink
echo "Camera stopped"
exit 0
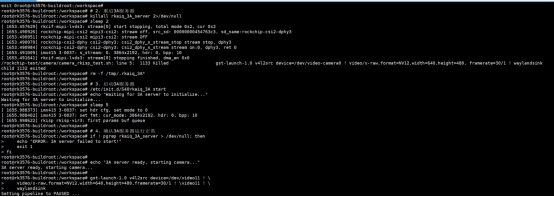
验证结果
使用新脚本后,连续多次启动摄像头,色彩始终正常,日志中不再出现no first iq setting或超时错误。
经验总结
-
对比日志是发现问题的关键:通过对比正常和异常情况的日志,快速定位到
no first iq setting这个关键线索 -
系统性诊断:不要盲目尝试,先检查各个组件(IQ文件、3A服务器、设备节点)的状态
-
前台运行看详细日志:很多后台服务的问题需要前台运行才能看到详细输出
-
理解组件间的协作关系:RK平台的摄像头涉及ISP驱动、3A服务器、IQ参数文件三者的协作,任何一个环节出问题都会导致异常
-
状态管理很重要:嵌入式系统的服务重启问题往往是状态机管理不当导致的,彻底重置是最可靠的方案。