2026-1/OPENWRT系统 3.现有功能优化/现有功能优化
在下载百问网官方适配后的Openwrt源码后,发现使用上有很多功能没有完全适配,出现部分使用过程中体验不好的问题,下面是针对笔者使用中发现的问题的记录与解决办法分析,希望给读者遇到类似问题后,一些解决问题的思路。因为本人知识有限,有什么错误的地方,欢迎交流讨论。
安装第三方ipk无法使用
默认的云端mirror库的libc使用musl,使用glibc后烧进去,发现安装的程序都用不了,默认openwrt都是用的musl libc。
安装第三方的fdisk无法使用
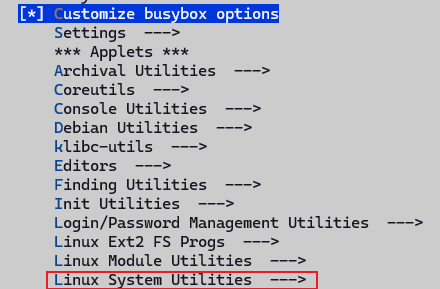
默认的busybox配置,很多工具都没有,fdisk通过opkg安装后某个提示库不存在,需要手动配置Busybox的选项,我们把打开自定义busybox选项,然后配置fdisk使能。
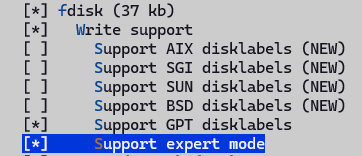
然后重新编译镜像,然后刷入,测试便可以发现fdisk可以使用了。
sysupgrade镜像无法使用
使用默认生成的sysupgrade镜像,在界面【系统-备份与升级-刷写新的固件】里面选择了编出来的固件的时候,发现无法使用,有如下错误打印信息:
Tue Dec 2 17:27:21 2025 user.info upgrade: Device 100ask,dshanpi-a1 not supported by this image
Tue Dec 2 17:27:21 2025 user.info upgrade: Supported devices: 100ask,dshanpia1
Tue Dec 2 17:27:21 2025 user.info upgrade: Reading partition table from bootdisk...
Tue Dec 2 17:27:22 2025 user.info upgrade: Reading partition table from image...
Tue Dec 2 17:27:22 2025 user.info upgrade: Device 100ask,dshanpi-a1 not supported by this image
Tue Dec 2 17:27:22 2025 user.info upgrade: Supported devices: 100ask,dshanpia1
Tue Dec 2 17:27:22 2025 user.info upgrade: Reading partition table from bootdisk...
Tue Dec 2 17:27:22 2025 user.info upgrade: Reading partition table from image..
检查发现是armv8.mk里面定义的设备名称,和dts中的compatible不一致, 致 sysupgrade 拒绝刷机。
OpenWrt sysupgrade 会读取:
- 当前运行设备的标识:
来自:
/proc/device-tree/compatible/etc/board.json
- 固件中 embedded 的 supported_devices 列表
二者任意一个字符不匹配就报:Device XXX not supported by this image
这里知道问题所在了,修改就比较简单了,按照如下方式修改:
- 修改 target/linux/rockchip/image/armv8.mk,保持和dts中的一致
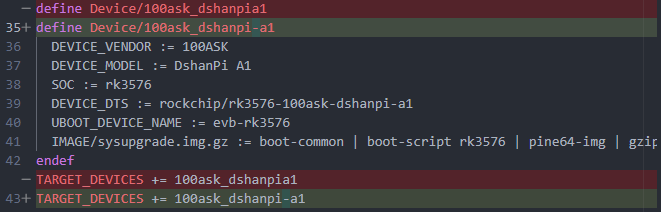
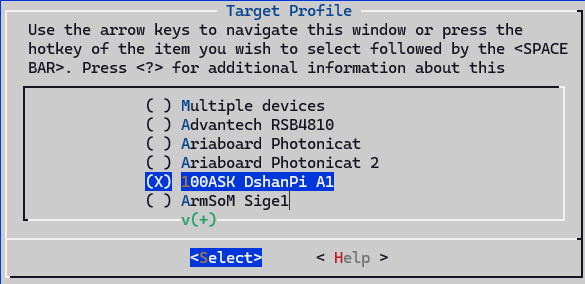
- 重新执行make menuconfig,选择target,会自动更新.config文件
- 重新执行make V=s -j8,进行镜像编译即可。
sftp无法使用
默认的使用的dropbear做为ssh server,没有sftp功能,这里我们修改配置,关掉dropbear,然后在Network -> SSH下面打开openssh,如下图所示。
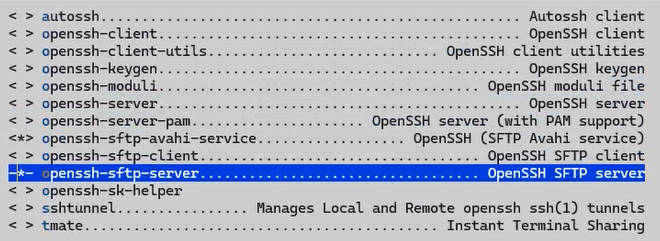
编译无法通过,openssh-sk-helper编译依赖libfido2,我们手动使能这个库,选中为y,然后重新编译即可。
注意:openssh-server和openssh-server-pam无法同时使能,我们打开没有PAM支持的编译即可。
rootfs空间太小
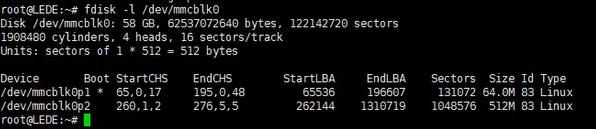
我们优先刷的squashfs格式的镜像,可以比较方便的恢复出厂配置,因为squashfs格式的rom是基于overlayfs的,更新的配置不会直接改到rom里面的内容。但是我们可以发现默认配置的rootfs的大小比较小,而板载的EMMC有58G,我们可以将rootfs空间扩大到8G,剩下的空间单独分配一个分区。
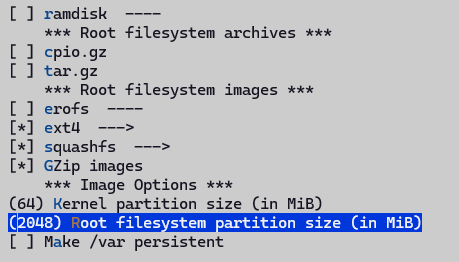
默认配置的rootfs分区为512M,如下所示:
修改配置,默认rootfs分区大小为2G,修改 Target Images下的Rootfs分区大小配置,如下所示:
usb设备无法识别
当我们只简单的在设备树使能usb0和usb1过后,会发现能识别到U盘了,但是usb驱动probe期间会打印dr_mode强制设置为host的打印,查找代码发现是默认配置的otg,但是没有otg对应的配置,并且drd相关的代码都未编译。
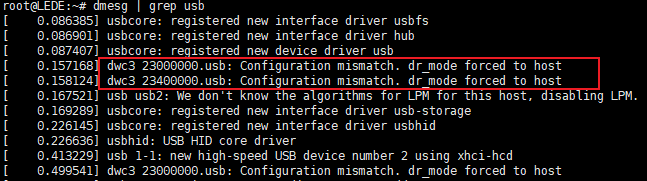
需要修改设备树文件,使能usb0和usb1控制器,默认角色为host。使能DRD ROLE SWITCH功能,然后就可以动态配置控制器角色,然后还可以指定默认角色。
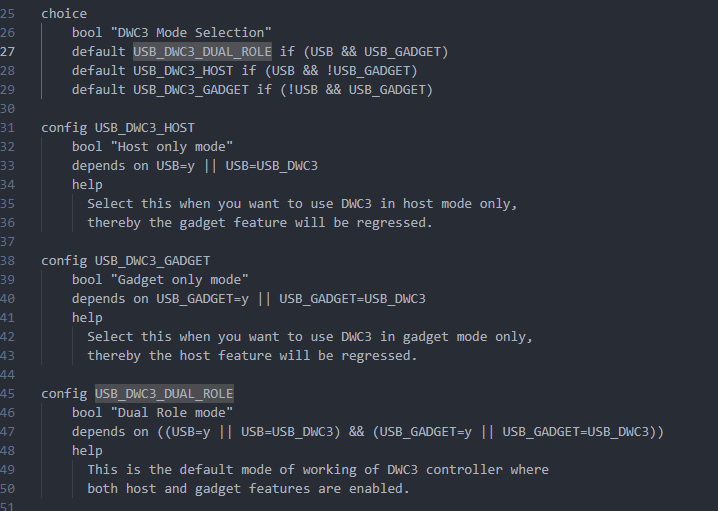
必须要打开了 USB Gadget才能是能双角色功能,那么我们打开,然后在Mode Selection里面选中Dual Role mode,这样会在内核生成usb_role的sysfs节点,可以动态配置成host或者peripheral,在dshan pi a1上,usb1固定为host,usb0可以配置为双角色,可以切换,那么我们做如下dts配置:


--- a/target/linux/rockchip/files/arch/arm64/boot/dts/rockchip/rk3576-100ask-dshanpi-a1.dts
+++ b/target/linux/rockchip/files/arch/arm64/boot/dts/rockchip/rk3576-100ask-dshanpi-a1.dts
@@ -770,6 +770,20 @@
status = "okay";
};
+// usb0 as type-c port, can be host or peripheral.
+&usb_drd0_dwc3 {
+ status = "okay";
+ usb-role-switch;
+ role-switch-default-mode ="host";
+};
+
+// usb1 as type-a port, fixed to host
+&usb_drd1_dwc3 {
+ status = "okay";
+ usb-role-switch;
+ role-switch-default-mode ="host";
+};
+
&uart0 {
pinctrl-0 = <&uart0m0_xfer>;
status = "okay";
配置后,usb1可以使用,但是usb0无法使用,并且板载Hynetek HUSB311 Type-C 芯片,可以提供USB PD和USB Type-C的功能。发现默认6.12内核版本的驱动,没有该芯片的支持,查看rockip官方仓库,有这款芯片的支持,需要移植过赖,我们暂时不需要DP功能,屏蔽掉。
PWM风扇一直最大风速
上电后,风扇一直以最大转速工作,声音比较大,需要修改下,支持按照温度自动调整转速,这样更符合常见的应用场景。排查记录如下:
查硬件
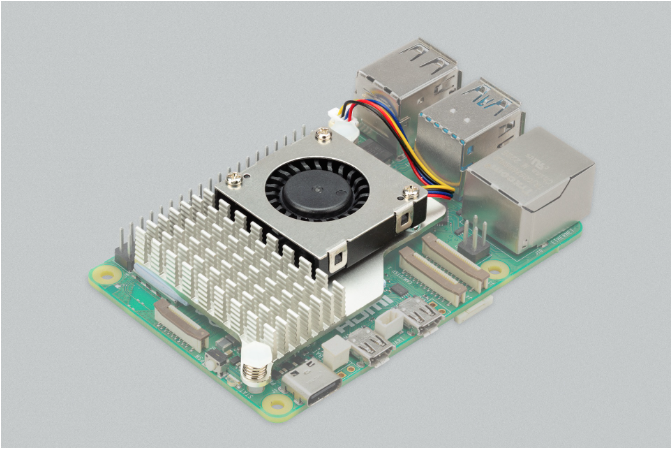
风扇使用的树莓派5的4针风扇,是标准的4针JST插口,实物图和原理图如下:
| PIN序号 | 功能 |
|---|---|
| 1 | +5V |
| 2 | PWM |
| 3 | GND |
| 4 | 转速 |
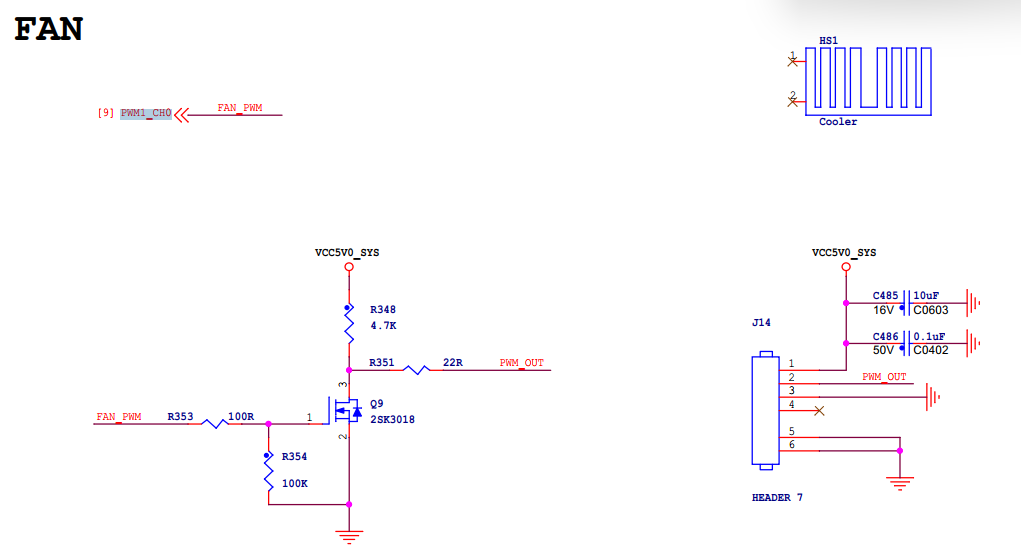
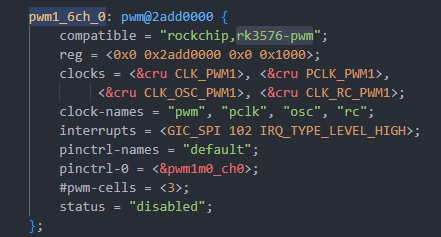
查看了手册,2脚连接的PWM1,4脚连接的风扇转速口,说明不支持读取转速,只能PWM控制转速。看原理图是PWM1_CH0,dts里面也有对应的配置,根据compatible字段"pwm-fan"到驱动里面搜索,发现存在linux-6.12.43/drivers/hwmon/pwm-fan.c这个文件没有编译,那么就是KCONFIG没有选中,没有编译pwm-fan的驱动。
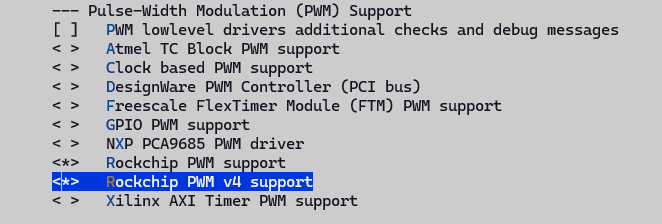
使能PWM驱动
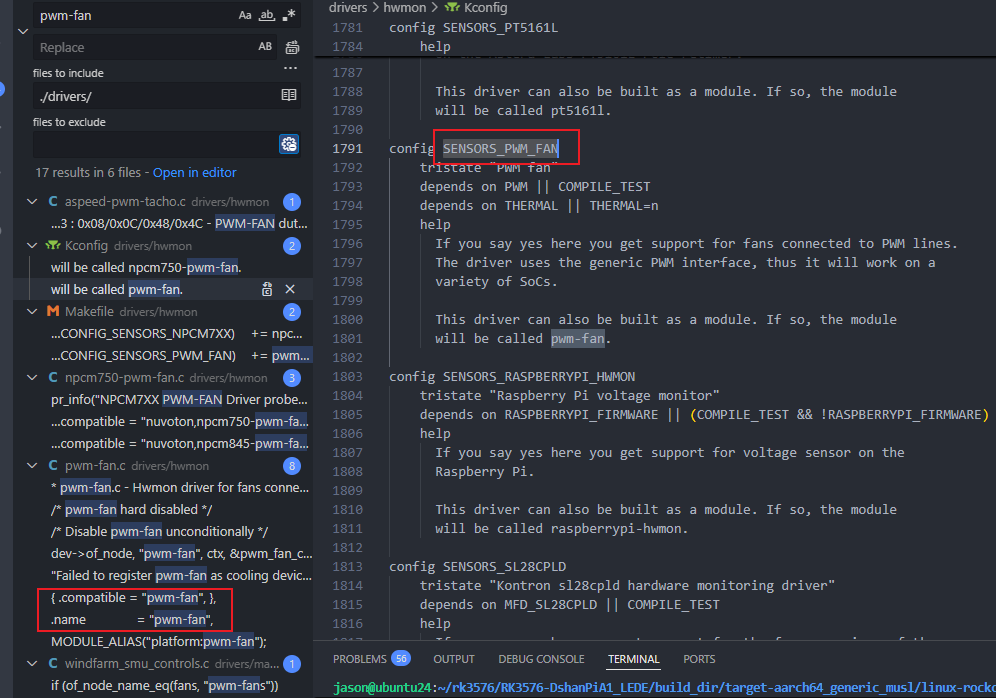
那么我们直接make kernel_menuconfig,搜索COFNIG_SENSORS_PWM_FAN,然后输入搜索结果对应的序号,然后就会直接跳转到配置对应的地方,直接输入Y使能即可。

编译刷写后,启动过程中发现pwm-fan驱动启动失败,有如下打印:
![]()
可以得出,没有找到上游的PWM设备,搜索引用的节点的compatible,发现对应的驱动未打开,在单独的目录下:drivers/soc/rockchip
打开的驱动:

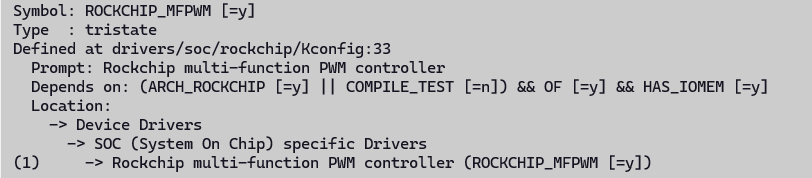
打开后,会出现编译问题,我们修改如下:
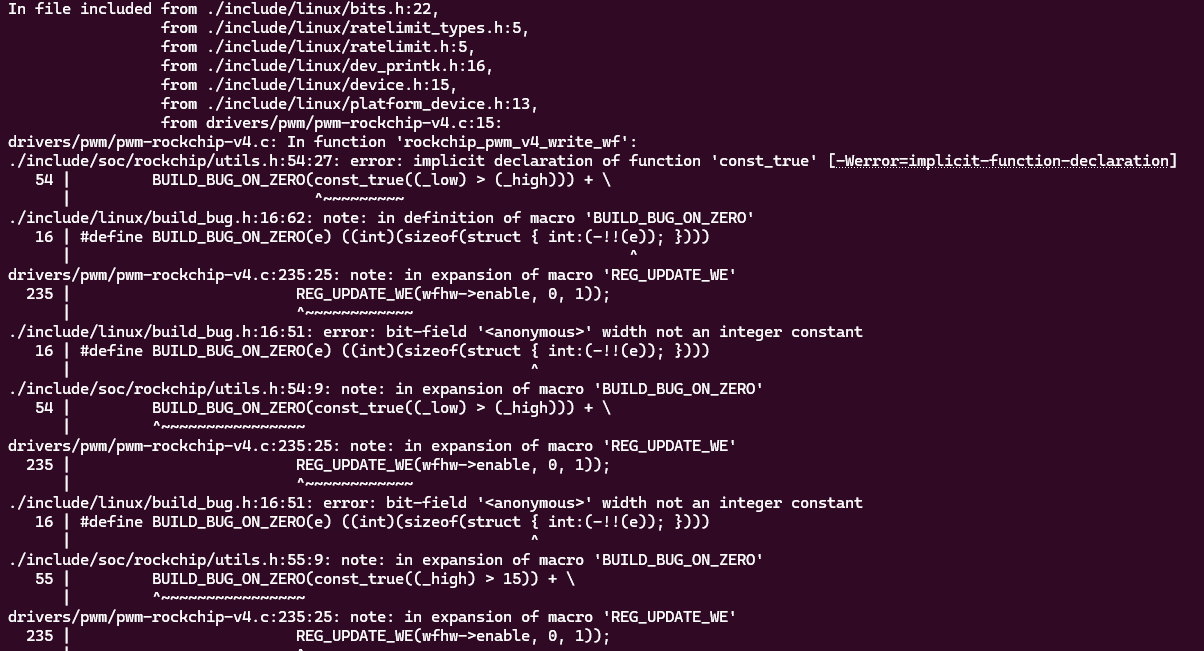
修改如下:
--- a/include/soc/rockchip/utils.h 2025-11-23 03:35:07.695086227 +0800
+++ b/include/soc/rockchip/utils.h 2025-11-23 03:34:43.946599951 +0800
@@ -50,6 +50,7 @@
*
* Return: the value, shifted into place, with the required write-enable bits
*/
+#if 0
#define REG_UPDATE_WE(_val, _low, _high) ( \
BUILD_BUG_ON_ZERO(const_true((_low) > (_high))) + \
BUILD_BUG_ON_ZERO(const_true((_high) > 15)) + \
@@ -57,6 +58,11 @@
BUILD_BUG_ON_ZERO(const_true((u64) (_val) > U16_MAX)) + \
((_val & GENMASK((_high) - (_low), 0)) << (_low) | \
(GENMASK((_high), (_low)) << 16)))
+#else
+#define REG_UPDATE_WE(_val, _low, _high) ( \
+ ((_val & GENMASK((_high) - (_low), 0)) << (_low) | \
+ (GENMASK((_high), (_low)) << 16)))
+#endif
/**
* REG_UPDATE_BIT_WE - update a bit with a write-enable mask
@@ -68,9 +74,14 @@
*
* Return: a value with bit @__bit set to @__val and @__bit << 16 set to ``1``
*/
+#if 0
#define REG_UPDATE_BIT_WE(__val, __bit) ( \
BUILD_BUG_ON_ZERO(const_true((__val) > 1)) + \
BUILD_BUG_ON_ZERO(const_true((__val) < 0)) + \
REG_UPDATE_WE((__val), (__bit), (__bit)))
+#else
+#define REG_UPDATE_BIT_WE(__val, __bit) ( \
+ REG_UPDATE_WE((__val), (__bit), (__bit)))
+#endif
#endif /* __SOC_ROCKCHIP_UTILS_H__ */
配置转速方法
手动配置pwm-fan的方法,在sysfs下面查找pwm-fan的目录,进入/sys/class/hwmon/hwmon0/下,即可看到两个文件pwm1_enable和pwm1,先配置pwm1为100,观察风扇声音是否减小,试验发现确实变小了,说明PWM控制生效了。
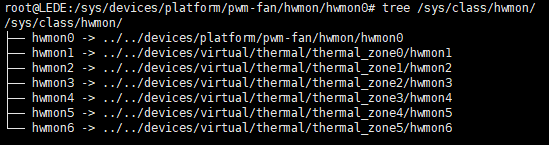
root@LEDE:~# ls /sys/class/hwmon/hwmon0/
device of_node pwm1 subsystem
name power pwm1_enable uevent
root@LEDE:~# echo 100 > /sys/class/hwmon/hwmon0/pwm1
参考文档:
- Documentation/hwmon/pwm-fan.rst
- Documentation/devicetree/bindings/hwmon/pwm-fan.yaml
- Documentation/driver-api/thermal/sysfs-api.rst
也可以根据thermal框架,下面的cooling_device找到pwm-fan。在thermal cooling device框架下有注册的sysfs接口,对应绑定pwm_fan驱动提供的ops,将state数值对应dts中配置的cooling_levels数组索引,进而可以通过配置0..max_state的数值,来配置pwm驱动里面对应的相对速度,在shell里面直接。
static const struct thermal_cooling_device_ops pwm_fan_cooling_ops = {
.get_max_state = pwm_fan_get_max_state,
.get_cur_state = pwm_fan_get_cur_state,
.set_cur_state = pwm_fan_set_cur_state,
};
//dts
fan: pwm-fan {
status = "okay";
compatible = "pwm-fan";
#cooling-cells = <2>;
pwms = <&pwm1_6ch_0 0 50000 1>;
// 这里对应state从0..5
cooling-levels = <0 100 125 150 200 255>;
// 这里配置的trips,没有生效。我们需要将它放到thermal框架里去
rockchip,temp-trips = <
40000 1
50000 2
60000 3
65000 4
70000 5
>;
};
root@LEDE:~# ls /sys/class/thermal/cooling_device0/
cur_state max_state power subsystem type uevent
root@LEDE:~# cat /sys/class/thermal/cooling_device0/max_state
5
# 这里等同于 echo 100 > /sys/class/hwmon/hwmon0/pwm1
root@LEDE:~# echo 1 > /sys/class/thermal/cooling_device0/cur_state
增加自动调整转速功能
自动调整转速,依赖于thermal系统,主要有theraml_zone,cooling_device,trip_point三个组成。
参考文章:Linux Thermal 框架解析-CSDN博客
在原本的dts里面配置的thermal_zones节点下新增对应的trip。
单独编译dts 失败
make target/linux/prepare V=s
make target/linux/compile DTBS=1 V=s
然后你就可以直接找到生成的:
build_dir/target-*/linux-*/linux-*/arch/arm64/boot/dts/*.dtb
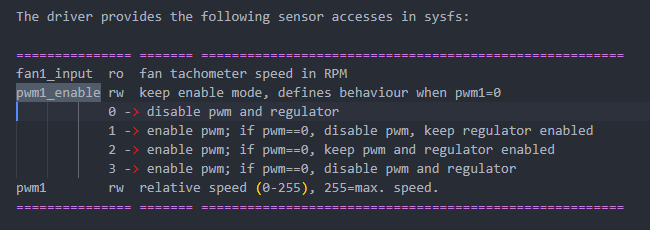
配置pwm1或者cur_state=0的时候,风扇转速最大。根据kernel文档关于pwm_fan的sysfs节点说明,可以由pwm1_enable文件进行配置当pwm1=0的时候的具体行为。默认的值为1,即disable pwm, keep regulator enabled。所以设置成0的时候,会直接拉满。
所以这里我们配置cooling-levels数组的时候,第0个元素的值设置为10,以较低速度转动。然后pwm1_enable设置为2,即pwn=0的时候,pwm和regulator都还有输出,即占空比0。
板载LED灯没有驱动
这是一个 由单线串行控制的 RGB LED 灯带链路:
- 芯片:WS2812C-2020
- 灯的数量:4 个(RUN × 4)
- 每个 LED 既是 RGB LED,又集成了驱动芯片
- 只需要 1 根 GPIO 数字信号线 就能控制一串灯
典型用途:
- 状态灯
- 跑马灯
- 主板灯光
- 工控指示灯
- 路由器/电视盒子的呼吸灯
WS2812 是 单线 800kHz NRZ 协议,不是普通 PWM。Linux 内核无法直接 bit-bang 得够快,必须使用能产生精确的波形才能驱动。
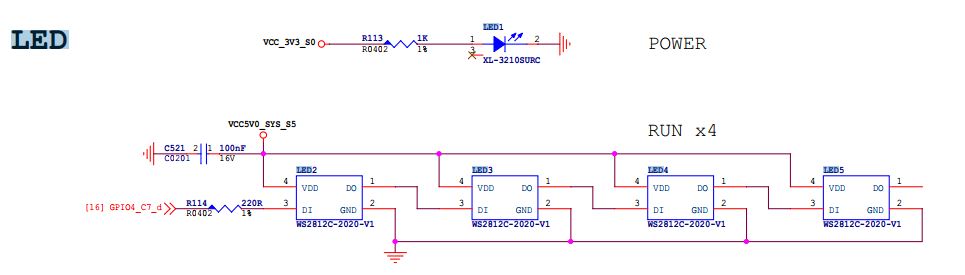
通过搜索源码,发现工程里面有提供的两种驱动,一个是leds-ws2812b,一个是ws2812-pio-rp1。仔细检查发现一个是基于spi,一个是基于pio扩展芯片的方式,我们原理图里面只能使用spi hacking的方式。
配置方法参考redmi的配置,适配到dshanpi即可。
原理图里面的PIN脚没有MOSI功能,无法使用SPI HACKING,咨询得到,需要使用PWM HACKING方式。
MMC驱动经常打印报错
驱动报错信息:
[ 1344.988178] mmc0: Timeout waiting for hardware interrupt.
[ 1344.988672] mmc0: sdhci: ============ SDHCI REGISTER DUMP ===========
[ 1344.989235] mmc0: sdhci: Sys addr: 0x00000002 | Version: 0x00000005
[ 1344.989800] mmc0: sdhci: Blk size: 0x00007200 | Blk cnt: 0x00000002
[ 1344.990364] mmc0: sdhci: Argument: 0x00069e72 | Trn mode: 0x0000003f
[ 1344.990929] mmc0: sdhci: Present: 0x03f700f1 | Host ctl: 0x00000035
[ 1344.991493] mmc0: sdhci: Power: 0x0000000d | Blk gap: 0x00000000
[ 1344.992057] mmc0: sdhci: Wake-up: 0x00000000 | Clock: 0x0000030f
[ 1344.992621] mmc0: sdhci: Timeout: 0x0000000e | Int stat: 0x00000000
[ 1344.993185] mmc0: sdhci: Int enab: 0x03ff000b | Sig enab: 0x03ff000b
[ 1344.993749] mmc0: sdhci: ACmd stat: 0x00000000 | Slot int: 0x00000000
[ 1344.994313] mmc0: sdhci: Caps: 0x3a6dc881 | Caps_1: 0x08000007
[ 1344.994876] mmc0: sdhci: Cmd: 0x0000123a | Max curr: 0x00000000
[ 1344.995439] mmc0: sdhci: Resp[0]: 0x00000900 | Resp[1]: 0xfff6dbff
[ 1344.996003] mmc0: sdhci: Resp[2]: 0x320f5903 | Resp[3]: 0x00009001
[ 1344.996566] mmc0: sdhci: Host ctl2: 0x0000380f
[ 1344.996957] mmc0: sdhci: ADMA Err: 0x00000060 | ADMA Ptr: 0x00000000fc300210
[ 1344.997581] mmc0: sdhci: ============================================
dmesg里面probe的信息:
[ 0.438699] mmc0: SDHCI controller on 2a330000.mmc [2a330000.mmc] using ADMA 64-bit
[ 0.499319] mmc0: new HS400 Enhanced strobe MMC card at address 0001
[ 0.500422] mmcblk0: mmc0:0001 CJNB4R 58.2 GiB
[ 0.502009] mmcblk0: p1 p2 p3
[ 0.502655] mmcblk0boot0: mmc0:0001 CJNB4R 4.00 MiB
[ 0.503828] mmcblk0boot1: mmc0:0001 CJNB4R 4.00 MiB
[ 0.504873] mmcblk0rpmb: mmc0:0001 CJNB4R 4.00 MiB, chardev (247:0)
根据AI搜索和DTS里面的信息, 看得出来 eMMC 在上电初始化阶段是 完全正常工作的, 控制器寄存器/时钟/复位/pinctrl 基本没问题,否则根本不会成功切到 HS400 ES、识别分区 。
,可以尝试降档到HS200或者降低频率的方式,来进行测试,找一个稳定工作的版本,本地测试了两种方法:
- 降档到HS200,不修改频率
mmc-hs200-1_8v;
//mmc-hs400-1_8v;
//mmc-hs400-enhanced-strobe;
测试后发现,HS200工作没问题,启动打印:
[ 0.439179] mmc0: SDHCI controller on 2a330000.mmc [2a330000.mmc] using ADMA 64-bit
[ 0.492249] mmc0: new HS200 MMC card at address 0001
[ 0.493187] mmcblk0: mmc0:0001 CJNB4R 58.2 GiB
[ 0.494771] mmcblk0: p1 p2 p3
[ 0.495416] mmcblk0boot0: mmc0:0001 CJNB4R 4.00 MiB
[ 0.496586] mmcblk0boot1: mmc0:0001 CJNB4R 4.00 MiB
[ 0.497629] mmcblk0rpmb: mmc0:0001 CJNB4R 4.00 MiB, chardev (247:0)
- 保持HS400不变,降低频率到100M
//max-frequency = <200000000>;
max-frequency = <100000000>; //work perfect on 100M
测试后发现,也能正常工作,启动打印:
[ 0.439264] mmc0: SDHCI controller on 2a330000.mmc [2a330000.mmc] using ADMA 64-bit
[ 0.492185] mmc0: new HS400 Enhanced strobe MMC card at address 0001
[ 0.493275] mmcblk0: mmc0:0001 CJNB4R 58.2 GiB
[ 0.494696] mmcblk0: p1 p2 p3
[ 0.495331] mmcblk0boot0: mmc0:0001 CJNB4R 4.00 MiB
[ 0.496498] mmcblk0boot1: mmc0:0001 CJNB4R 4.00 MiB
[ 0.497546] mmcblk0rpmb: mmc0:0001 CJNB4R 4.00 MiB, chardev (247:0)
但是发现使用docker的时候会有各种错误打印:
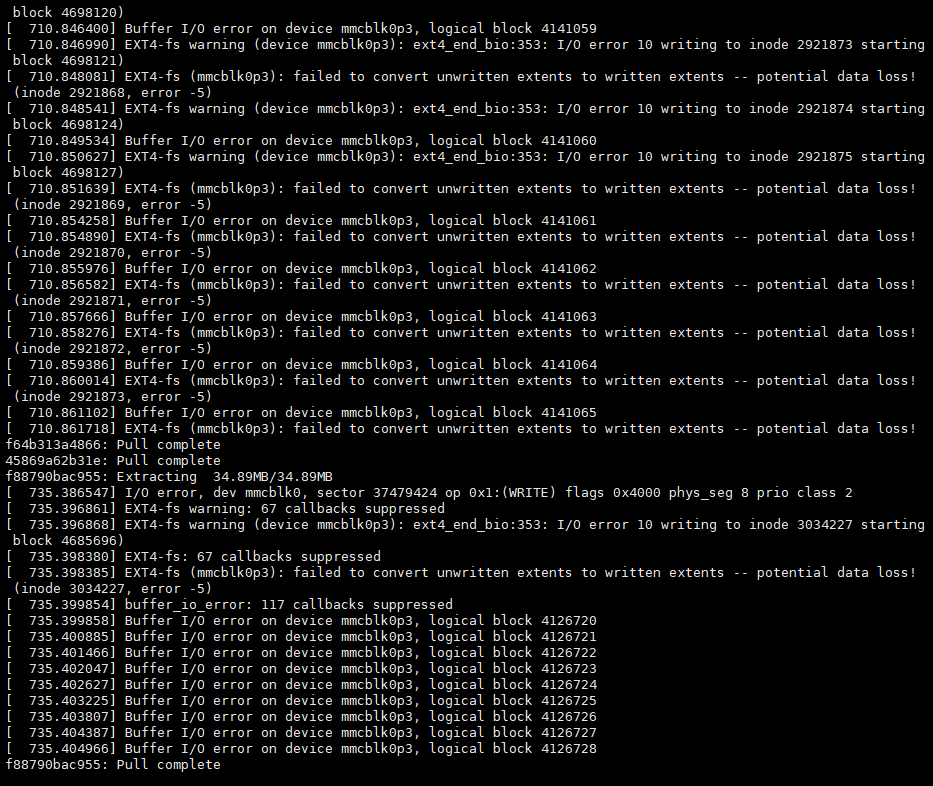
就现使用最小修改的方法,设备树删除HS400模式配置,设置HS200模式,测试稳定运行,就先用这种。