Uart串口
参考资料:
-
Serial Programming Guide for POSIX Operating Systems:https://digilander.libero.it/robang/rubrica/serial.htm
-
Linux串口编程:https://www.cnblogs.com/feisky/archive/2010/05/21/1740893.html
-
Linux串口—struct termios结构体https://blog.csdn.net/yemingzhu163/article/details/5897156
-
源码获取:AppBaseCode
1 串口API
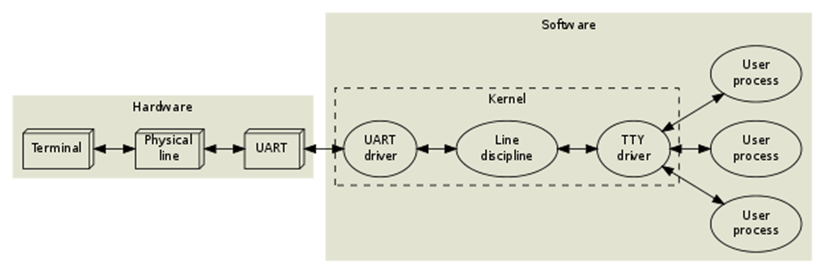
图 11.1 Linux串口通信
在Linux系统中,操作设备的统一接口就是:open/ioctl/read/write。对于UART,又在ioctl之上封装了很多函数,主要是用来设置行规程。所以对于UART,编程的套路就是:
-
open;
-
设置行规程,比如波特率、数据位、停止位、检验位、RAW模式、一有数据就返回;
-
read/write;
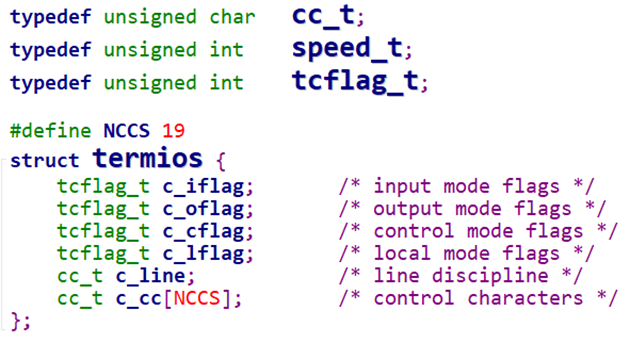
怎么设置行规程?行规程的参数用结构体termios来表示,可以参考Linux串口—struct termios结构体:https://blog.csdn.net/yemingzhu163/article/details/5897156)
这些函数在名称上有一些惯例:
-
tc:terminal contorl
-
cf: control flag
下面列出一些函数:
表 11‑1 行规程函数
| 函数名 | 作用 |
|---|---|
| tcgetattr | get terminal attributes,获得终端的属性 |
| tcsetattr | set terminal attributes,修改终端参数 |
| tcflush | 清空终端未完成的输入/输出请求及数据 |
| cfsetispeed | sets the input baud rate,设置输入波特率 |
| cfsetospeed | sets the output baud rate,设置输出波特率 |
| cfsetspeed | 同时设置输入、输出波特率 |
函数不多,主要是需要设置好termios中的参数,这些参数很复杂,可以参考Linux串口—struct termios结构体。
2 串口收发实验
本实验通过把串口的发送、接收引脚短接,实现自发自收:使用write函数发出字符,使用read函数读取字符。
本节源码:11_uart\01_serial_send_recv\serial_send_recv.c
2.1 源码分析
程序用法为:“./serial_send_recv <dev> [string]”
首先打开设备节点,代码如下:
105 int open_port(char *com)
106 {
107 int fd;
108 //fd = open(com, O_RDWR|O_NOCTTY|O_NDELAY);
109 fd = open(com, O_RDWR|O_NOCTTY);
110 if (-1 == fd){
111 return(-1);
112 }
113
114 if(fcntl(fd, F_SETFL, 0)<0) /* 设置串口为阻塞状态*/
115 {
116 printf("fcntl failed!\n");
117 return -1;
118 }
119
120 return fd;
121 }
……
127 int main(int argc, char **argv)
128 {
……
152 fd = open_port(argv[1]);
153 if (fd < 0)
154 {
155 printf("open %s err!\n", argv[1]);
156 return -1;
157 }
第152行调用open_port函数打开设备节点。
第105~121行是open_port函数的代码。
第109行调用open函数打开设备节点。
第114行设置串口为阻塞状态。
然后设置串口参数,代码如下:
159 iRet = set_opt(fd, 115200, 8, 'N', 1);
160 if (iRet)
161 {
162 printf("set port err!\n");
163 return -1;
164 }
set_opt函数的核心功能为:设置波特率等参数、设置VMIN、VTIME等参数,代码如下:
11 /* set_opt(fd,115200,8,'N',1) */
12 int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop)
13 {
14 struct termios newtio,oldtio;
15
16 if ( tcgetattr( fd,&oldtio) != 0) {
17 perror("SetupSerial 1");
18 return -1;
19 }
20
21 bzero( &newtio, sizeof( newtio ) );
22 newtio.c_cflag |= CLOCAL | CREAD;
23 newtio.c_cflag &= ~CSIZE;
24
25 newtio.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/
26 newtio.c_oflag &= ~OPOST; /*Output*/
……
34 newtio.c_cflag |= CS8;
……
51 newtio.c_cflag &= ~PARENB;
……
69 case 115200:
70 cfsetispeed(&newtio, B115200);
71 cfsetospeed(&newtio, B115200);
……
79 if( nStop == 1 )
80 newtio.c_cflag &= ~CSTOPB;
……
83
84 /* VMIN-字节, VTIME-时间(单位0.1秒)
85 * VMIN=0, VTIME=0 : read() 会立即返回,无论是否有数据可读(非阻塞模式)
86 * VMIN=0, VTIME!=0 : read() 会等待最多 VTIME 指定的时间,直到接收到第一个字节,然后返回已接收到的数据。
87 * VMIN!=0,VTIME=0 : read() 会阻塞,直到接收到至少 VMIN 个字节的数据
88 * VMIN!=0,VTIME!=0 : read() 会在接收到第一个字节后,继续等待最多 VTIME 指定的时间,直到接收到至少 VMIN 个字节的数据。
89 *
90 */
91 newtio.c_cc[VMIN] = 1;
92 newtio.c_cc[VTIME] = 0;
93
94 tcflush(fd,TCIFLUSH);
95
96 if((tcsetattr(fd,TCSANOW,&newtio))!=0)
97 {
98 perror("com set error");
99 return -1;
100 }
101 //printf("set done!\n");
102 return 0;
103 }
第21~26行的初始化一个termios 结构体,作用见表11.1:
表11.1 UART设置参数
| 参数 | 作用 | 典型应用场景 |
|---|---|---|
| bzero() | 初始化结构体 | 把配置全部清零 |
| CLOCAL | CREAD | 本地连接 + 启用接收 | 避免依赖调制解调器信号 |
| ~CSIZE | 清除数据位设置 | 为后续设置数据位(如 CS8)做准备 |
| ~ICANON | 非规范模式 | 实时读取单字节数据(如传感器) |
| ~ECHO | ~ECHOE | 禁用回显 | 避免输入干扰输出 |
| ~ISIG | 禁用信号 | 防止 Ctrl+C 终止程序 |
| ~OPOST | 原始输出 | 确保数据原样发送 |
第27~80在termios 结构体里面继续设置数据位、检验位、波特率、停止位。
第91~92行设置VMIN、VTIME参数分别为1、0,表示读取串口时要一直等待,直到至少读取到1个字节。
第94行清空串口的 输入缓冲区,确保后续操作不受残留数据影响。
第96行使用构造好的termios 结构体来设置串口。
最后,如果程序参数个数为3,则把第3个参数作为字符串发送给串口,代码如下:
166 if (argc == 3)
167 {
168 iRet = write(fd, argv[2], strlen(argv[2]));
169 if (iRet != strlen(argv[2]))
170 {
171 printf("write err\n");
172 return -1;
173 }
174 return 0;
175 }
如果程序参数个数为2,则进入回环操作:读取串口数据,再把这个数据写回去。代码如下:
177 printf("Enter a char: ");
178 while (1)
179 {
180 char c;
181 scanf("%c", &c);
182 iRet = write(fd, &c, 1);
183 iRet = read(fd, &c, 1);
184 if (iRet == 1)
185 printf("get: %02x %c\n", c, c);
186 else
187 printf("can not get data\n");
188 }
189
190 return 0;
191 }
第181行从控制终端读取1个字符。
第182行,把这个字符发送给串口。
第183行,读取串口,可以得到回环的数据,也就是上面写出去的数据。
第185行,打印读到的数据:先以16进制打印,在以字符形式打印。
2.2 硬件连接
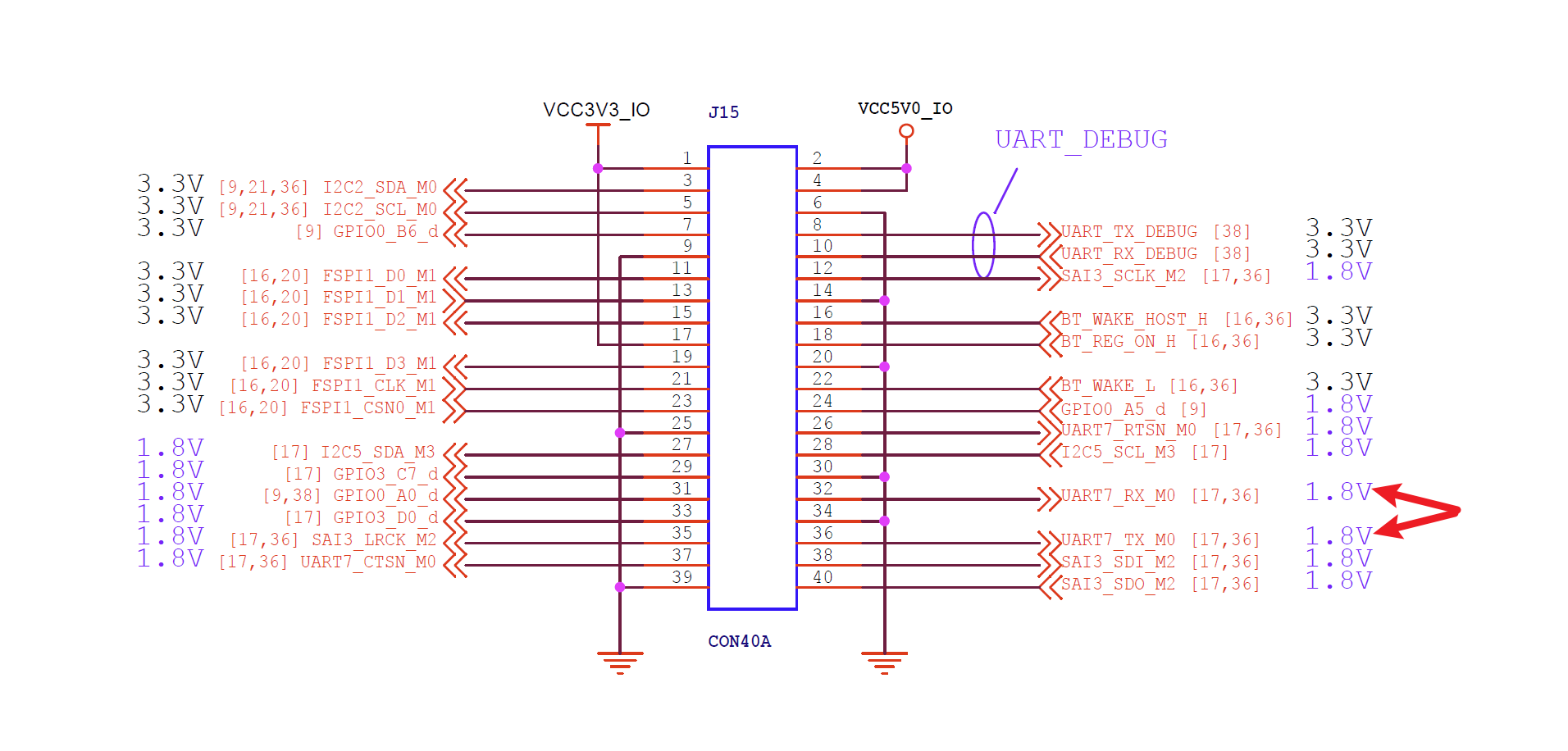
对于DshanPI A1,把下图所示2个插针(拓展排针的第32、36插针)使用杜邦线互相连接(它对应设备节点/dev/ttyS7):

图 11.2 百问网DshanPI A1 UART收发实验接线
对应硬件原理图的位置:
2.3 上机操作
把代码上传到开发板,进入源码目录执行如下命令编译程序:
gcc -o serial_send_recv serial_send_recv.c
然后执行如下命令进行回环操作:
baiwen@dshanpi-a1:~/appBase/14_UART/01_app_send_recv$ sudo ./serial_send_recv /dev/ttyS7
Enter a char: a
get: 61 a
get: 0a
b
get: 62 b
get: 0a
c
get: 63 c
get: 0a
^C