多线程加速推理
参考资料:
1.YOLOV5推理
1.1 获取模型
进入模型目录:
cd ~/Projects/rknn_model_zoo/examples/yolov5/model
下载模型:
chmod +x download_model.sh
./download_model.sh
进入模型转换环境:
conda activate rknn-toolkit2
进入模型转换程序目录:
(rknn-toolkit2) baiwen@dshanpi-a1:~/Projects/rknn_model_zoo/examples/yolov5/model$ cd ../python/
(rknn-toolkit2) baiwen@dshanpi-a1:~/Projects/rknn_model_zoo/examples/yolov5/python$ ls
convert.py yolov5.py
执行程序:
python convert.py ../model/yolov5s_relu.onnx rk3576
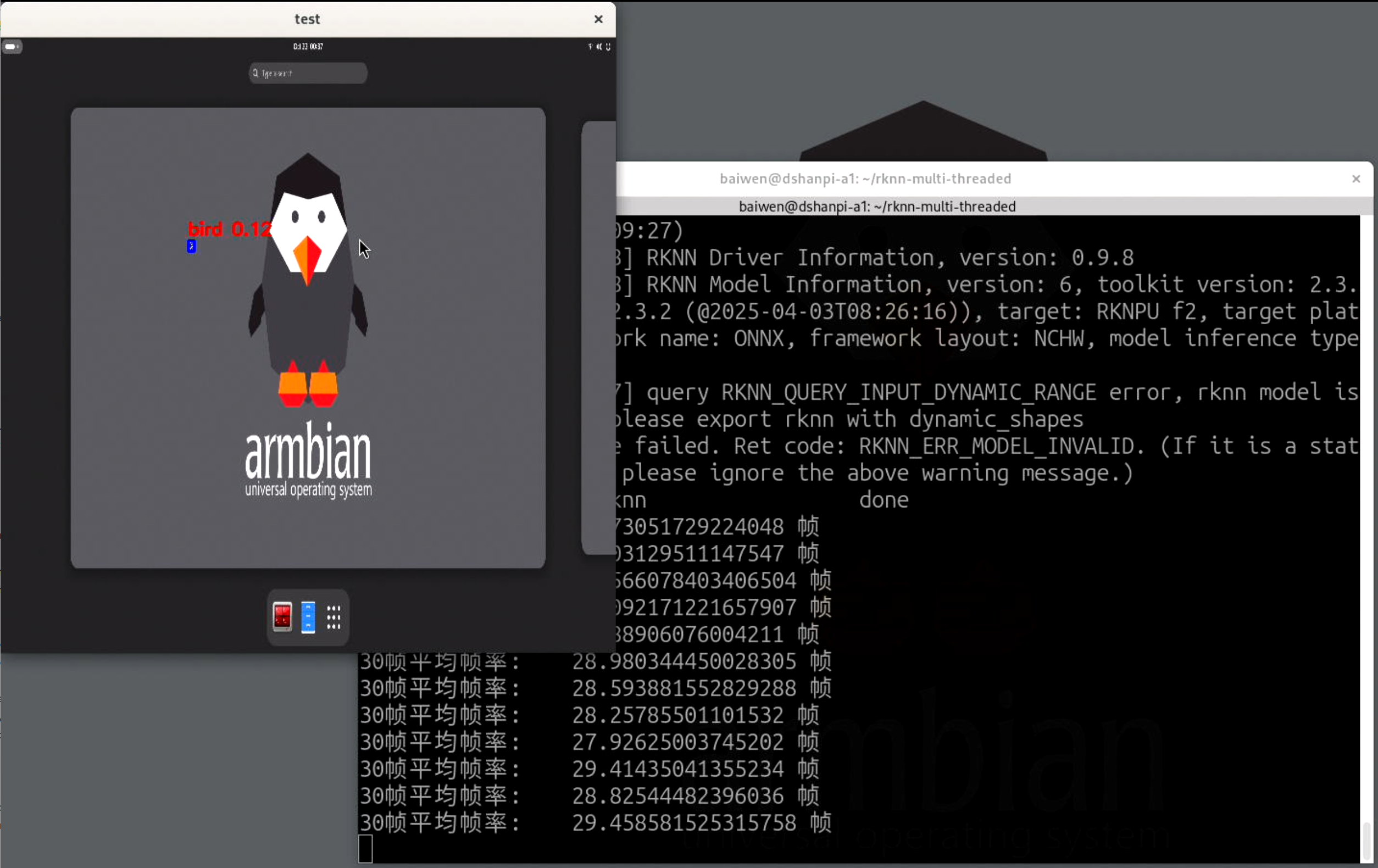
执行完成后可以在model目录下,看到转换完成后的yolov5.rknn。
修改模型测试程序yolov5.py,将原来的程序为:
if platform in ['pytorch', 'onnx']:
input_data = img.transpose((2,0,1))
input_data = input_data.reshape(1,*input_data.shape).astype(np.float32)
input_data = input_data/255.
else:
input_data = img
修改为:
# preprocee if not rknn model
if platform in ['pytorch', 'onnx']:
input_data = img.transpose((2,0,1))
input_data = input_data.reshape(1,*input_data.shape).astype(np.float32)
input_data = input_data/255.
else:
#input_data = img
input_data = np.expand_dims(img, 0).copy() # [1, H, W, C]
input_data = np.ascontiguousarray(input_data)
执行测试程序:
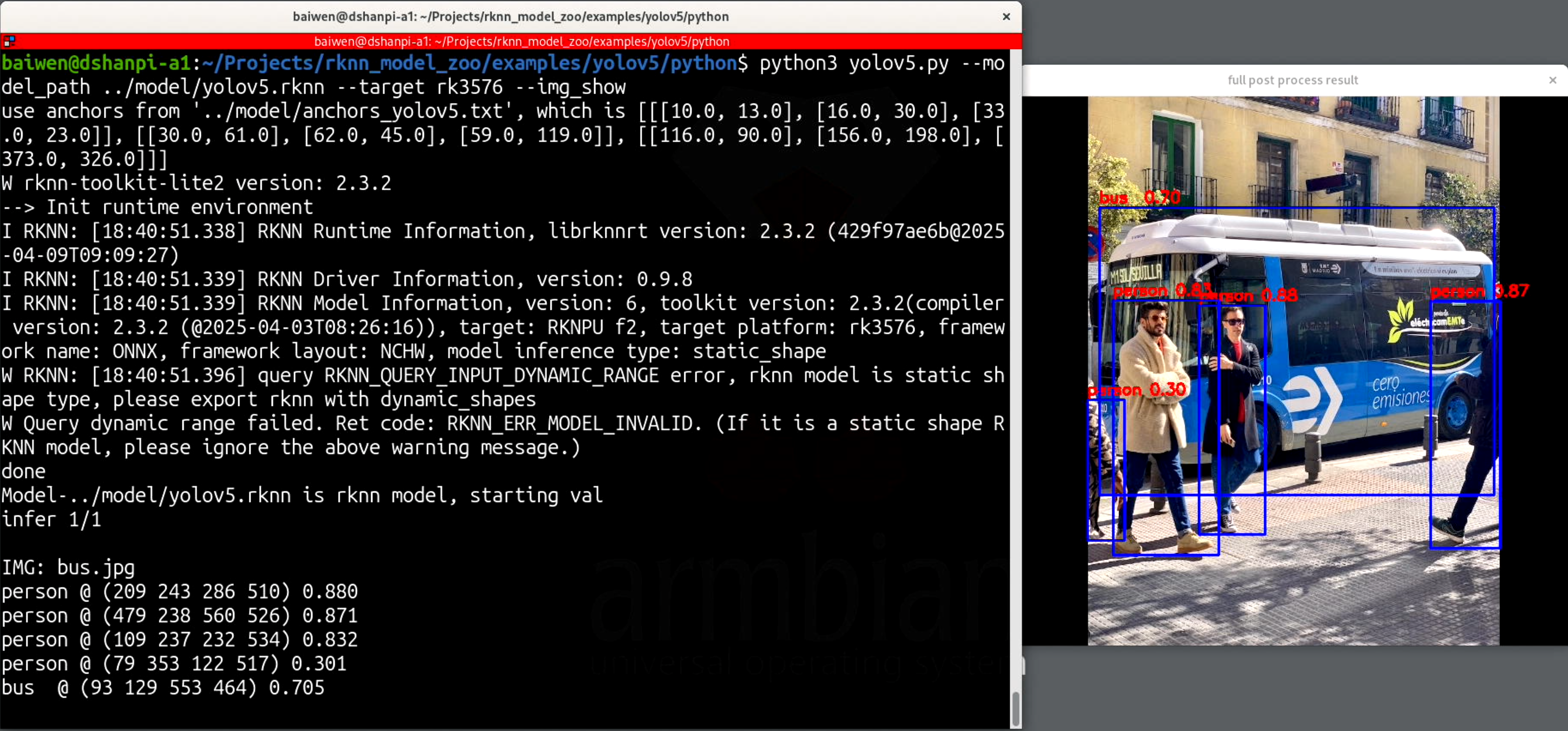
python yolov5.py --model_path ../model/yolov5.rknn --target rk3576 --img_show
运行效果:
1.2 多线程推理
- 下载源码工程:网盘链接 https://pan.baidu.com/s/1pUiBYfc6x4wv3phw1jcpyQ?pwd=2827 提取码: 2827
解压压缩包:
tar -xzvf rknn-multi-threaded.tar.gz
解压完成后,进入源码目录:
cd rknn-multi-threaded
下载测试视频:链接 https://pan.baidu.com/s/1NfSPEs3t2FOblPmukcqGJw?pwd=tupe 提取码: tupe
下载后放在源码目录下,如下所示:
baiwen@dshanpi-a1:~/rknn-multi-threaded$ ls
720p60hz.mp4 func.py LICENSE main.py performance.sh __pycache__ README.md rkcat.sh rknnModel rknnpool.py
将yolov5.rknn模型拷贝至rknnModel目录下,如下所示:
baiwen@dshanpi-a1:~/rknn-multi-threaded$ ls rknnModel/
yolov5.rknn
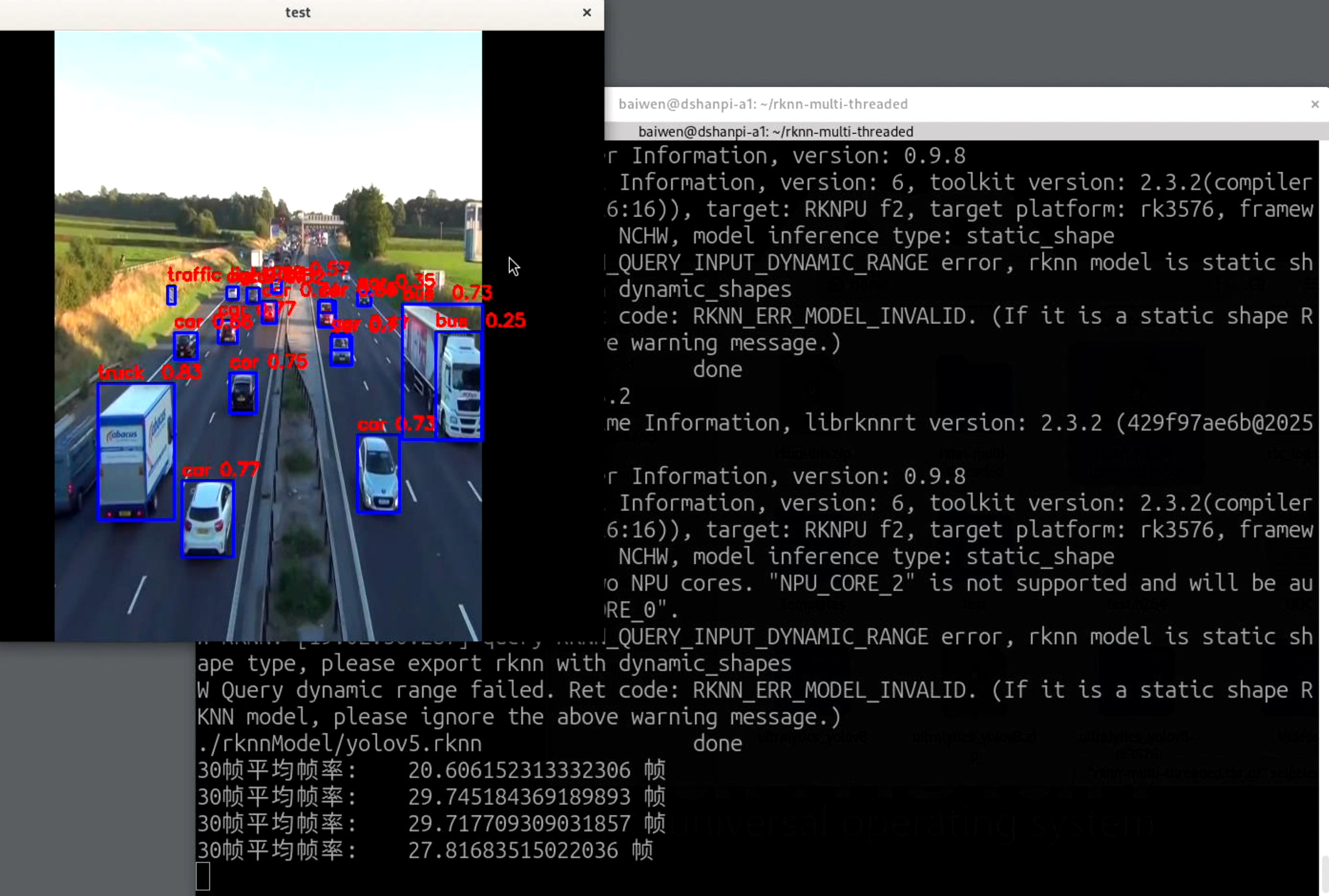
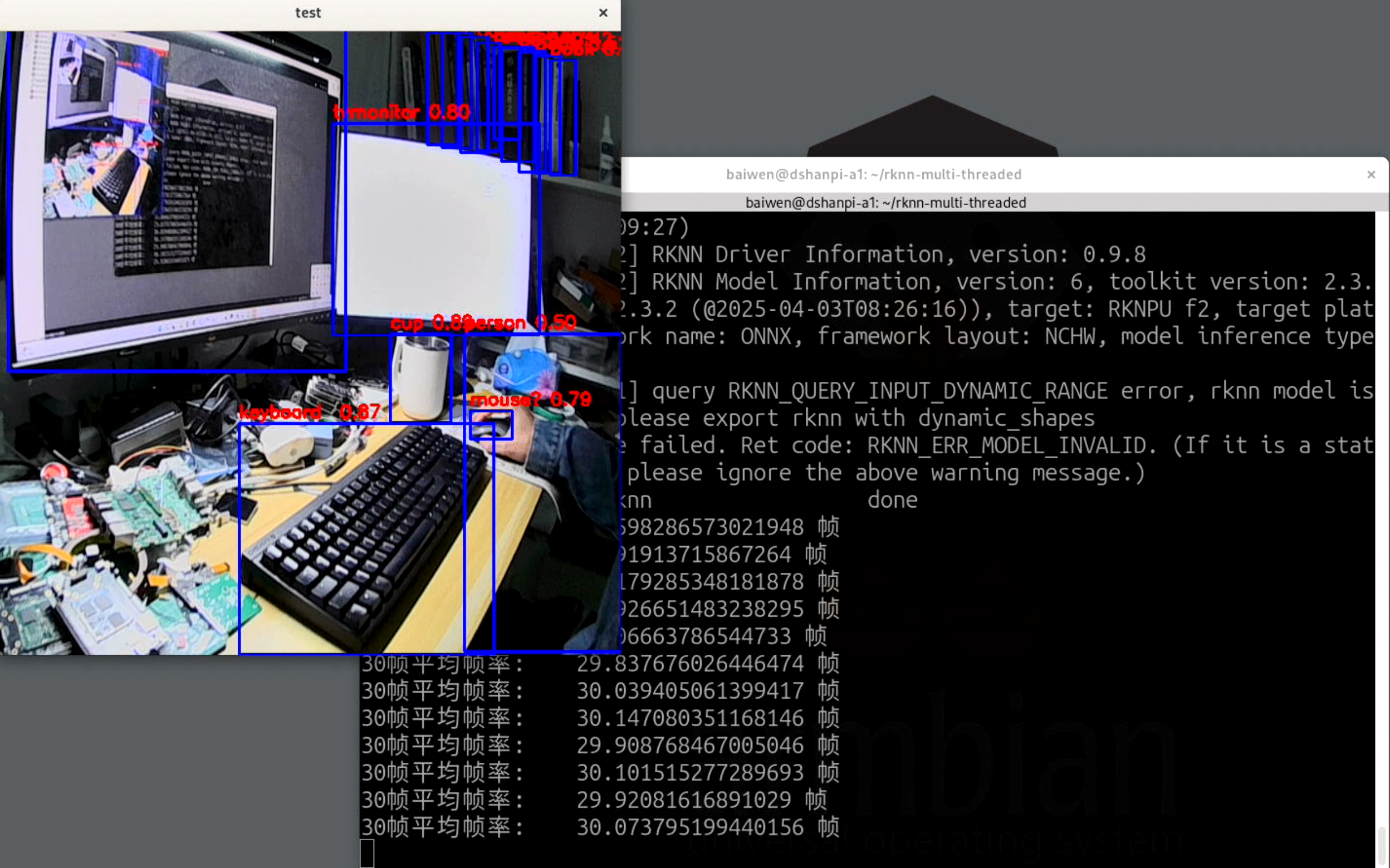
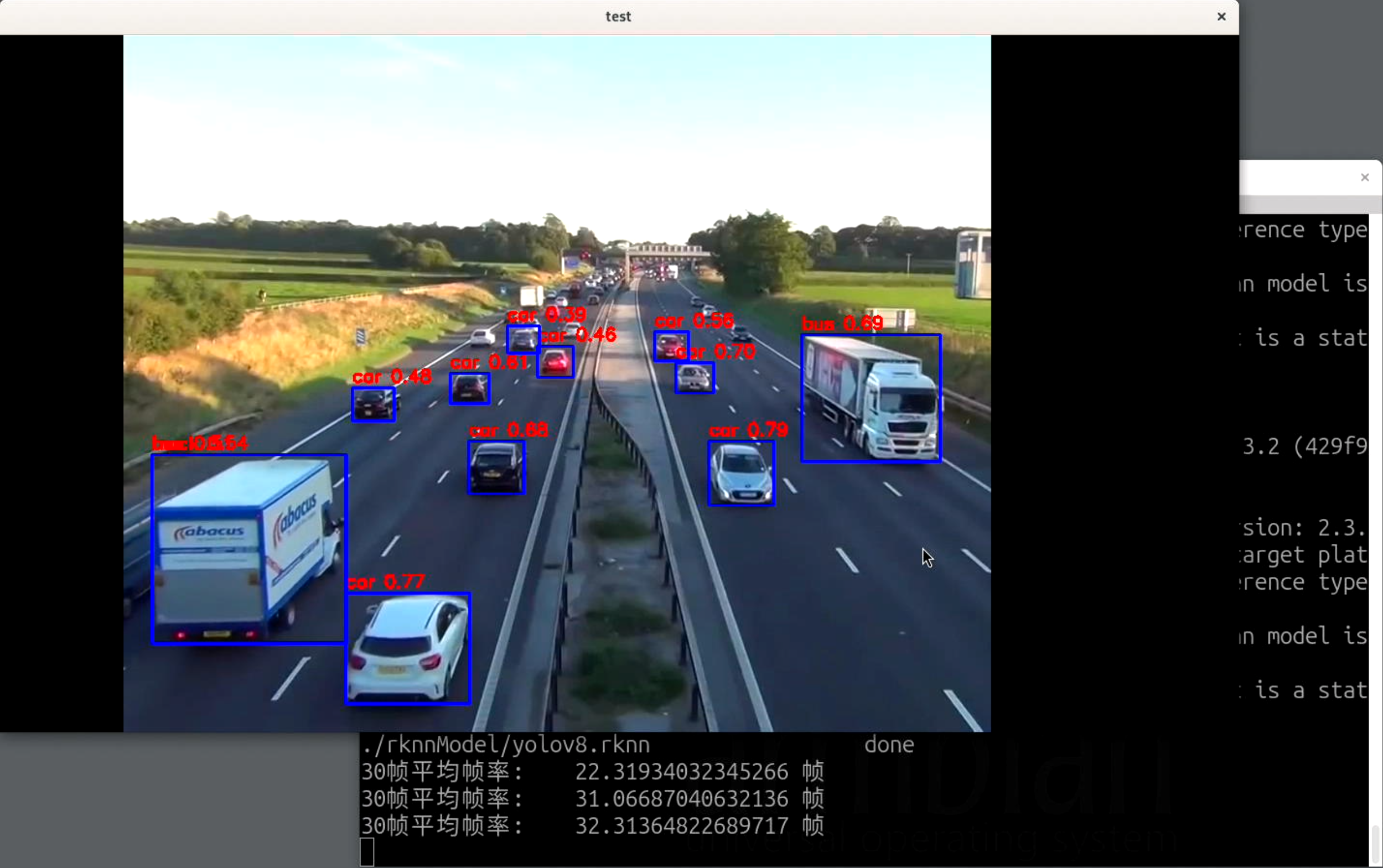
运行程序:
python3 main.py
运行效果如下:
1.3 视频流推理
1.3.1 USB 摄像头推理
修改源码,将原来的:
cap = cv2.VideoCapture('./720p60hz.mp4')
#cap = cv2.VideoCapture(0)
修改为:
#cap = cv2.VideoCapture('./720p60hz.mp4')
cap = cv2.VideoCapture(11)
注意:请确认您接入的USB摄像头的设备号,如果不确定可在执行 ls /dev/video* ,拔插USB摄像头确认设备号。我这里使用的是/dev/video11,所以代码中填入设备号11。
重新运行程序,运行效果:
1.3.2 HDMI IN 推理
修改源码,将原来的:
cap = cv2.VideoCapture('./720p60hz.mp4')
#cap = cv2.VideoCapture(0)
修改为:
gst_str = (
"v4l2src device=/dev/video0 ! "
"video/x-raw,format=NV12,width=1920,height=1080 ! "
"videoconvert ! " # NV12 → RGB
"appsink"
)
cap = cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
重新运行程序,将另一台开发板的HDMI OUT接入开发板的HDMI IN,下面为运行效果:
2.YOLOV8推理
2.1 获取模型
参考《AI进阶应用》->《目标检测模型部署》章节。
2.2 多线程推理
- 下载源码:网盘链接 https://pan.baidu.com/s/1dkih5aXYub0elBpmQv3Fjw?pwd=41p3 提取码: 41p3
解压压缩包:
tar -xzvf rknn-multi-threaded-yolov8.tar.gz
解压完成后,进入源码目录:
cd rknn-multi-threaded-yolov8
下载测试视频:链接 https://pan.baidu.com/s/1NfSPEs3t2FOblPmukcqGJw?pwd=tupe 提取码: tupe
下载后放在源码目录下,如下所示:
baiwen@dshanpi-a1:~/rknn-multi-threaded-yolov8$ ls
720p60hz.mp4 func.py LICENSE main.py performance.sh __pycache__ README.md rkcat.sh rknnModel rknnpool.py
将yolov5.rknn模型拷贝至rknnModel目录下,如下所示:
baiwen@dshanpi-a1:~/rknn-multi-threaded-yolov8$ ls rknnModel/
yolov8.rknn
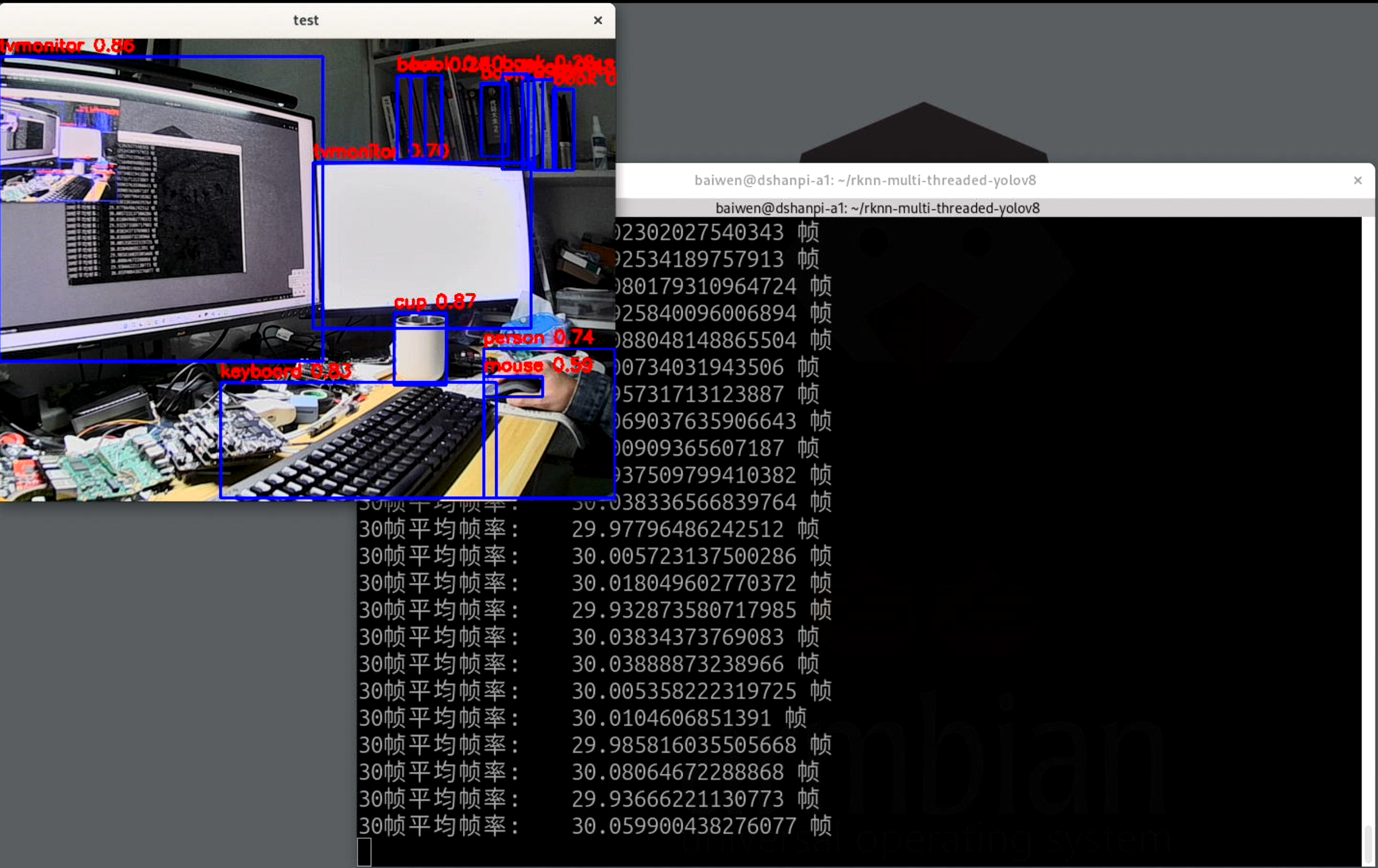
运行程序:
python3 main.py
运行效果如下:
1.3 视频流推理
1.3.1 USB 摄像头推理
修改源码,将原来的:
cap = cv2.VideoCapture('./720p60hz.mp4')
#cap = cv2.VideoCapture(0)
修改为:
#cap = cv2.VideoCapture('./720p60hz.mp4')
cap = cv2.VideoCapture(11)
注意:请确认您接入的USB摄像头的设备号,如果不确定可在执行 ls /dev/video* ,拔插USB摄像头确认设备号。我这里使用的是/dev/video11,所以代码中填入设备号11。
重新运行程序,运行效果:
1.3.2 HDMI IN 推理
修改源码,将原来的:
cap = cv2.VideoCapture('./720p60hz.mp4')
#cap = cv2.VideoCapture(0)
修改为:
gst_str = (
"v4l2src device=/dev/video0 ! "
"video/x-raw,format=NV12,width=1920,height=1080 ! "
"videoconvert ! " # NV12 → RGB
"appsink"
)
cap = cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
重新运行程序,将另一台开发板的HDMI OUT接入开发板的HDMI IN,下面为运行效果:
3.C++版YOLOV5推理
3.1 多线程推理
- 获取源码链接: https://pan.baidu.com/s/1v-Ah6N6QnhPt998-BYKAHA?pwd=228x 提取码: 228x
将源码传输至DshanPI A1端,如下所示:
baiwen@dshanpi-a1:~$ ls
rknn-cpp-Multithreading.tar.gz
解压源码:
tar -xzvf rknn-cpp-Multithreading.tar.gz
解压完成后进入源码目录:
cd rknn-cpp-Multithreading
执行编译脚本:
./build-linux_RK3576.sh
执行结果如下所示:
baiwen@dshanpi-a1:~/rknn-cpp-Multithreading$ ./build-linux_RK3576.sh
CMake Deprecation Warning at CMakeLists.txt:1 (cmake_minimum_required):
Compatibility with CMake < 3.5 will be removed from a future version of
CMake.
Update the VERSION argument <min> value or use a ...<max> suffix to tell
CMake that the project does not need compatibility with older versions.
-- The C compiler identification is GNU 13.3.0
-- The CXX compiler identification is GNU 13.3.0
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working C compiler: /usr/bin/aarch64-linux-gnu-gcc - skipped
-- Detecting C compile features
-- Detecting C compile features - done
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Check for working CXX compiler: /usr/bin/aarch64-linux-gnu-g++ - skipped
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Found OpenCV: /usr (found version "4.6.0")
-- Configuring done (1.6s)
-- Generating done (0.0s)
-- Build files have been written to: /home/baiwen/rknn-cpp-Multithreading/build/build_linux_aarch64
[ 40%] Building CXX object CMakeFiles/rknn_yolov5_demo.dir/src/rkYolov5s.cc.o
[ 40%] Building CXX object CMakeFiles/rknn_yolov5_demo.dir/src/preprocess.cc.o
[ 80%] Building CXX object CMakeFiles/rknn_yolov5_demo.dir/src/postprocess.cc.o
[ 80%] Building CXX object CMakeFiles/rknn_yolov5_demo.dir/src/main.cc.o
[100%] Linking CXX executable rknn_yolov5_demo
[100%] Built target rknn_yolov5_demo
[100%] Built target rknn_yolov5_demo
Install the project...
-- Install configuration: ""
-- Installing: /home/baiwen/rknn-cpp-Multithreading/install/rknn_yolov5_demo_Linux/./rknn_yolov5_demo
-- Installing: /home/baiwen/rknn-cpp-Multithreading/install/rknn_yolov5_demo_Linux/lib/librknnrt.so
-- Installing: /home/baiwen/rknn-cpp-Multithreading/install/rknn_yolov5_demo_Linux/lib/librga.so
-- Installing: /home/baiwen/rknn-cpp-Multithreading/install/rknn_yolov5_demo_Linux/.//model
-- Installing: /home/baiwen/rknn-cpp-Multithreading/install/rknn_yolov5_demo_Linux/.//model/coco_80_labels_list.txt
-- Installing: /home/baiwen/rknn-cpp-Multithreading/install/rknn_yolov5_demo_Linux/.//model/RK3576
-- Installing: /home/baiwen/rknn-cpp-Multithreading/install/rknn_yolov5_demo_Linux/.//model/RK3576/yolov5s-640-640.rknn
/home/baiwen/rknn-cpp-Multithreading
编译完成后,可以看到编译工作目录build和安装目录install:
baiwen@dshanpi-a1:~/rknn-cpp-Multithreading$ ls
720p60hz.mp4 build build-linux_RK3576.sh CMakeLists.txt include install LICENSE model performance.sh README.md src
进入可执行程序目录:
cd install/rknn_yolov5_demo_Linux/
执行程序:
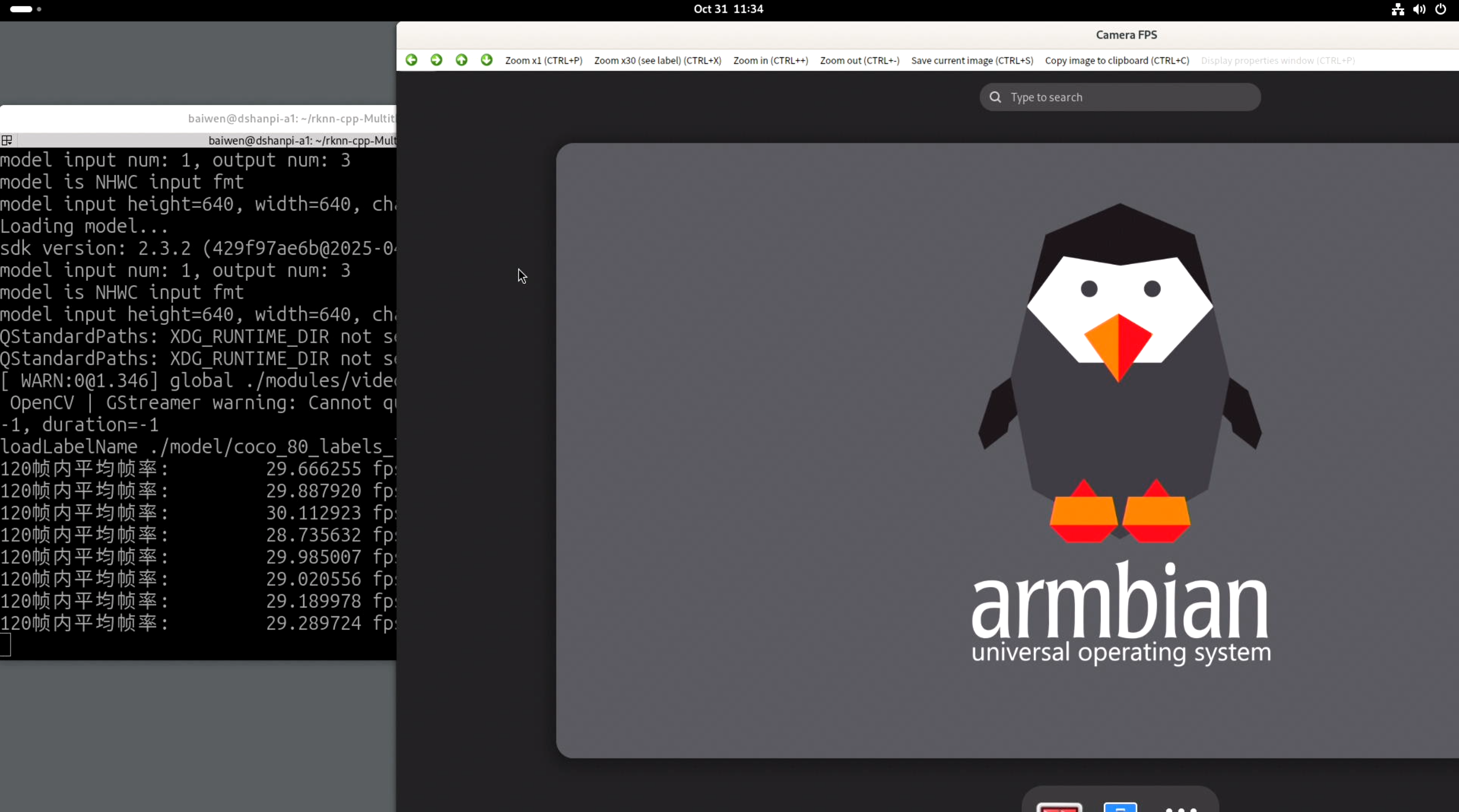
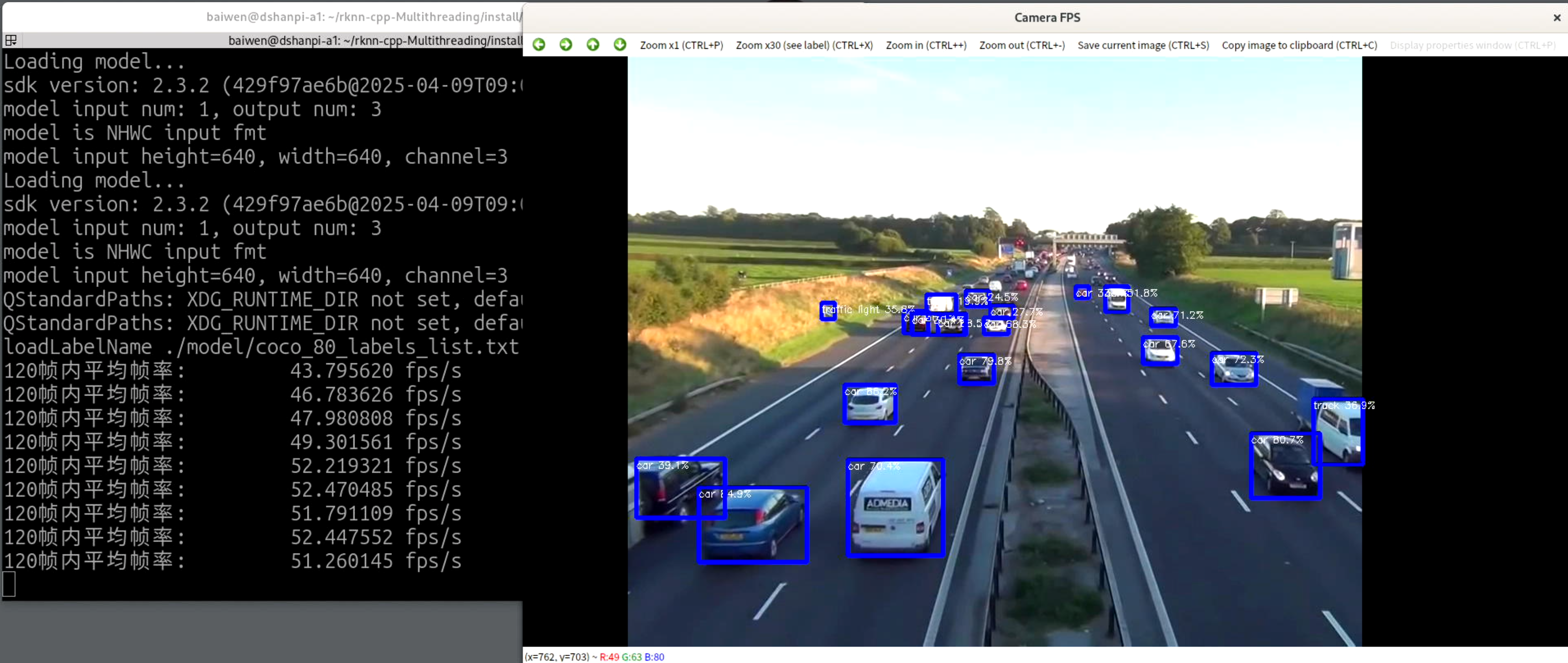
sudo ./rknn_yolov5_demo ./model/RK3576/yolov5s-640-640.rknn ../../720p60hz.mp4
运行效果如下:
3.2 视频流推理
3.2.1 USB 摄像头推理
程序默认支持USB摄像头推理,修改执行命令即可,在终端执行:
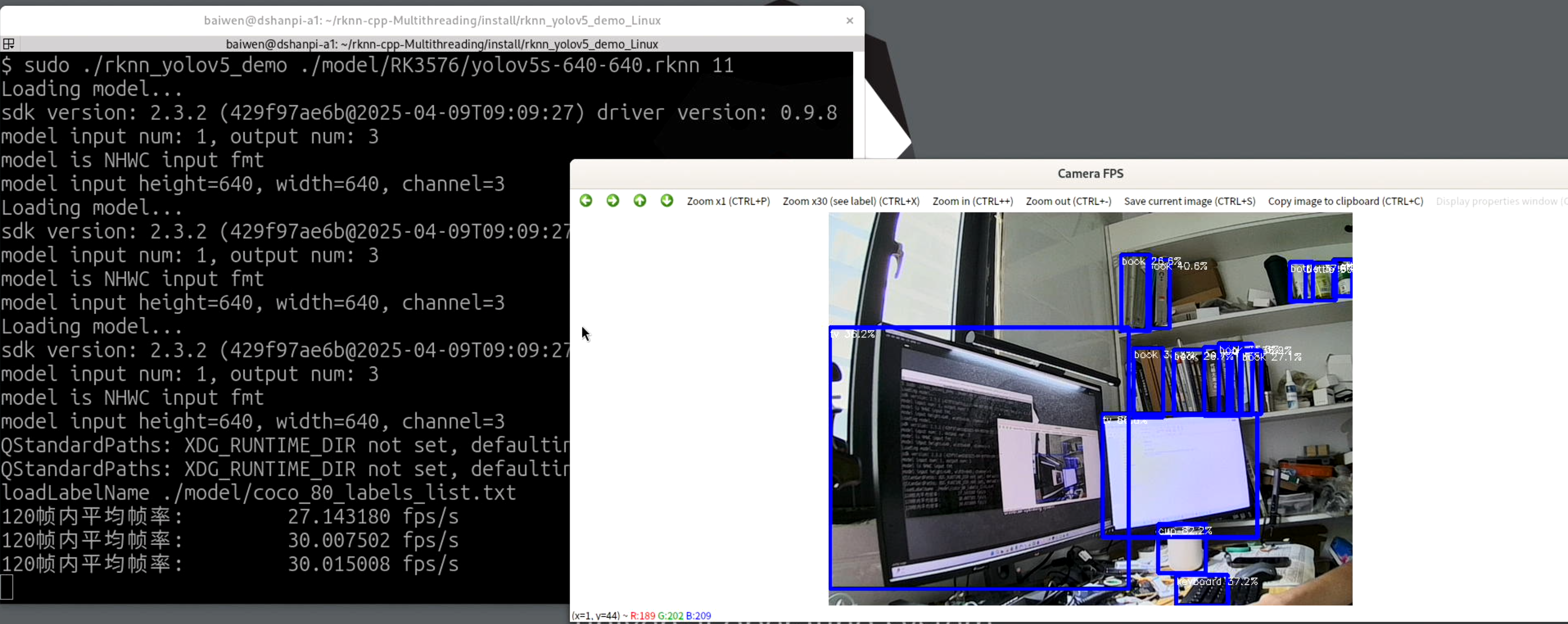
sudo ./rknn_yolov5_demo ./model/RK3576/yolov5s-640-640.rknn 11
- 其中
11为摄像头设备号,请确认你的摄像头的设备号,可通过拔插USB摄像头并执行ls /dev/video*确定。
运行效果如下:
3.2.2 HDMI IN推理
修改源码,找到src/main.cc文件。
1.在文件顶部增加头文件
#include <string>
2.你原来打开 capture open 的那几行替换成下面这段:
原来的:
if (is_integer(src)) {
int cam_idx = std::stoi(src);
// 优先用 V4L2 后端(Linux)
if (!capture.open(cam_idx, cv::CAP_V4L2)) {
fprintf(stderr, "Open camera index %d failed via V4L2. 可尝试:/dev/video%d 或检查权限(加入video组)。\n", cam_idx, cam_idx);
return -1;
}
} else if (src.rfind("/dev/video", 0) == 0) {
// 传了设备文件路径
if (!capture.open(src, cv::CAP_V4L2)) {
fprintf(stderr, "Open device %s failed via V4L2.\n", src.c_str());
return -1;
}
} else {
// 当作文件/RTSP/GStreamer管道字符串
if (!capture.open(src, cv::CAP_ANY)) {
fprintf(stderr, "Open source '%s' failed.\n", src.c_str());
return -1;
}
}
修改为:
cv::VideoCapture capture;
std::string gst_str =
"v4l2src device=/dev/video0 ! "
"video/x-raw,format=NV12,width=1920,height=1080,framerate=30/1 ! "
"videoconvert ! video/x-raw,format=BGR ! "
"appsink drop=1 sync=false max-buffers=2";
if (!capture.open(gst_str, cv::CAP_GSTREAMER)) {
fprintf(stderr, "Open GStreamer pipeline failed.\n");
return -1;
}
3.重新编译:
./build-linux_RK3576.sh
4.运行程序:
sudo ./rknn_yolov5_demo ./model/RK3576/yolov5s-640-640.rknn 0
运行效果: